Задачи синтеза. Задачи синтеза САУ заключаются в определении управляющего устройства в виде его математического описания. При этом считается, что задан объект управления, известны требования к точности и качество управления, известны условия работы, включая характеристики внешних воздействий, известны требования к надёжности, весу, габаритам и т.д. Синтез- создание управляющего устройства при известном условии. Задача синтеза - задача на оптимум. Большое число требований и их разнообразие даёт возможность сформировать единый критерий оптимальности и решения задачи синтеза, как задачу надёжности этого экстремума. Поэтому синтез разделяется на ряд этапов и на каждом этапе решается какая то часть задач синтеза(один отдельный аспект).
Частотный метод синтеза корректирующих устройств. Наиболее распространённым является частотный метод синтеза корректирующих устройств с помощью ЛЧХ. Он проводится следующим образом: Строится желаемая ЛАЧХ исходя из требованиям по точности и качества переходного процесса. Эта желаемая характеристика сравнивается с той, которую имеет система без коррекции. В результате сравнения определяется передаточная функция корректирующего устройства. Затем строится ФЧХ и с помощью её определяется полученные запасы устойчивости по амплитуде и фазе.
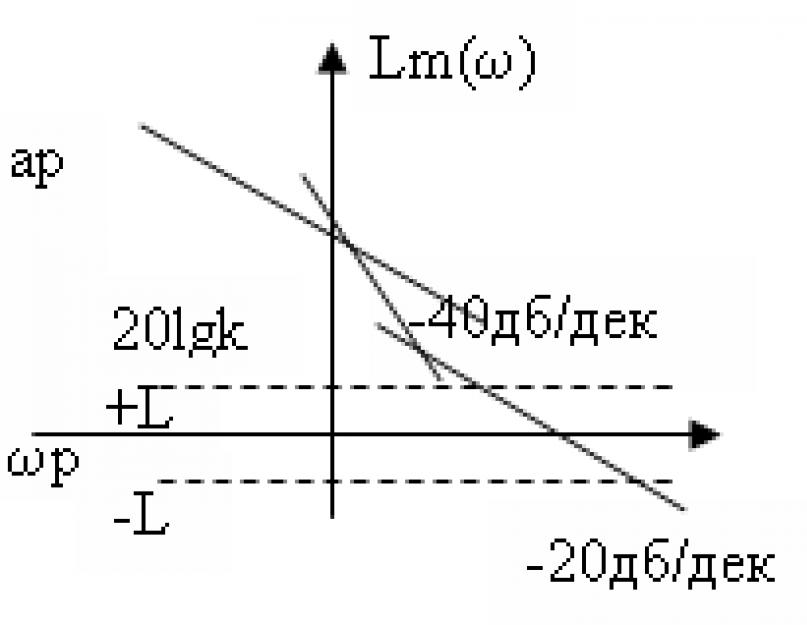
Формирование НЧ желаемой ЛАЧХ. Требования по точности могут формироваться по разному.
1.Пусть даны рабочая частота и амплитуда ( р и а р)и задана допустимая ошибка А = доп.
Для области низких частот, гдеW(j) >1
можно записать: Ф (j p)=1/1+W(j p)1/W(j p)
А =aW(j)= a/1+W(j p)a/W(j p)
 W(j p)а р / доп
W(j p)а р / доп

3. Для астатических систем задается скорость изменения вх сигнала
Если воздействие задано, как изменение с постоянной скоростью, то пользуются коэффициентами:

к - коэффициент передачи на рабочей частоте
В это случае АЧХ должна проходить выше точки 20lgk
Формирование СЧ желаемой ЛАЧХ.
СЧ – часть формируется исходя из требований к качеству перех проц-ов.
Пусть заданно допустимость перерегулирования и время процесса tп. Чтобы по этим данным определить частоту среза, используем график:
П ри=20%
ри=20%

 после этого их сопрягают.
после этого их сопрягают.
Высокочастотная часть ЛАЧХ заметной роли на качество не играет, поэтому
мы берём её такой же как у неизменяемой части.
Сущ-ет синтез последовательного и параллельного корректирующих устройств
Они взаимозаменяемы, поэтому рассмотрим только последовательные.

Считаем, что заданная ЧХ отличается от желаемой надо пред-ть коэф-т передачи и перед ф-ию КУ, к-ые обеспечили бы желаемые св-ва сис-мы.

Пусть к ж >к 0

Расстояние между W / o и W o – 20 lgk k – коэф-т усиления КУ

чтобы найти W k совмещают на одном графике ЧХ для W ж и для W / o


Общий порядок поэтапного синтеза линейной САУ.
1 этап. Определение порядка астатизма и коэффициента передачи системы, Эти параметры находятся исходя из требований к точности в установленном режиме при детерминированном воздействии. Если коэффициент передачи системы, который определяется по величине астатизма оказывается очень большим, что затрудняет стабилизацию системы, целесообразно повысить порядок астатизма и тем самым свести статическую ошибку к нулю, в независимости от коэффициента передачи системы. Если ввели астатизм, то в этом случае коэффициент передачи системы выбирается исходя только из соображений детальности и качества переходных процессов. На этом же этапе решается вопрос о применении воздействий по основному возмущению. Введение коррекции по возмущению целесообразно, если имеется возможность изменения этого возмущения, и введение коррекции по возмущению позволяющее упростить структуру замкнутого контура.
2 этап. Определение основного, т.е. не варьируемой части системы. При проектировании системы обычно часть звеньев системы оговаривают или определяют. Сюда относится объект управления и слежения с объектом устройства (исполнительный механизм, чувствительный элемент и т.д.).
Тем не менее эти звенья должны удовлетворять требованиям по точности и быстродействию. Часто при проектировании задаются другие звенья: преобразователи, усилители, вычислительные устройства. Набор известных элементов составляет костяк структурной схемы системы (иначе это называют основной или не варьируемой частью системы)
3 этап. Выбор коррекции и составление структурной части схемы САУ. Если требования к качеству переходных процессов и точности невысокие, то выбор корректирующих звеньев и варьируемых параметров осуществляется по условию обеспечения устойчивости системы и при этом стремятся к получению как можно больших запасов устойчивости. После выбора корректирующего устройства осуществляется выбор значения варьируемых параметров исходя из требований по точности и качества переходных процессов. Если же требования к качеству переходных процессов и точности достаточно высокие, то корректирующие устройства выбираются исходя из требований по качеству переходных процессов и точности. Корректирующие устройства выбираются таким образом, чтобы в первую очередь обеспечить те требования к качеству управления, которые наиболее жёсткие.
После того как выбрана коррекция предъявляется выполнение других требований к системе и при этом уточняется коррекция. Если мы применяем последовательную коррекцию, то найденная частотная характеристика и будет являться частотной характеристикой корректирующего устройства. По ней определяют передаточную функцию корректирующего устройства. Если предполагается применить корректирующую обратную связь, то её передаточную функцию находят по передаточной функции последовательного корректирующего устройства. Если одновременно используется последовательная и параллельная коррекция, то из передаточной функции варьируемой части сначала выделяется передаточная функция последовательного корректирующего устройства, а за тем оставшаяся часть корректируется как параллельное корректирующее устройство.
4 этап. Построение переходного процесса. Стремятся учесть все те упрощения, которые были сделаны на предыдущих этапах.
Синтез корректирующих устройств методом ЛАЧХ основан на знании желаемой ЛАЧХ проектируемой САУ в разомкнутом состоянии. ЛФЧХ при этом не рассматривается, так как система предполагается минимально-фазовой и при известной ЛАЧХ фазовая характеристика является заданной.
Желаемой ЛАЧХ называется такая ЛАЧХ, которой соответствует система с требуемыми показателями качества (время регулирования t р, перерегулирование s%, установившаяся ошибка е уст). Задачей синтеза корректирующего устройства является выбор его структуры и параметров так, чтобы максимально приблизить ЛАЧХ скорректированной системы к желаемой.
В качестве желаемых часто выбирают так называемые оптимальные характеристики, являющиеся наилучшими в каком-либо смысле. Системы с такими характеристиками называют оптимальными.
Передаточная функция и частотная характеристика оптимальной системы.
При построении желаемых ЛАЧХ разомкнутой системы используется понятие оптимальной системы. Для каждой САУ можно выбрать свои условия оптимальности. Здесь назовем процесс регулирования при ступенчатом задающем воздействии оптимальным, если он является монотонным и время регулирования t р является минимальным при ограниченной второй производной входной величины x(t).
Обозначим .
Время переходного процесса оптимальной системы обозначим через t min .
Процесс регулирования будет оптимальным, если ускорение g имеет максимальное значение g m и меняет знак при , т.е.

Тогда при (127)
 при (128)
при (128)
x 0 (t) – управляемая величина в оптимальном процессе.
При и тогда для можно записать в виде
Объединяя (1)-(3) с помощью единичных ступенчатых функций, получим
Из зависимости (130) можно получить
В зависимости от величины входного воздействия будем изменять
Пусть ![]() .
.
это минимальное время отработки ступенчатого сигнала g 0 с ускорением управляемой величины, не превосходящем g m .
Найдем передаточную функцию замкнутой оптимальной системы
![]() Учитывая (130), (131), получим
Учитывая (130), (131), получим
Определим передаточную функцию разомкнутой системы. Имеем
![]()
и тогда из (132) и (133) найдем

Полученная передаточная функция является трансцендентной функцией p. Это означает, что принятая форма оптимального процесса регулирования, определяемая выражением (130) не может быть точно реализована линейной стационарной САУ. Однако она определяет тот предел, к которому следует приближать процессы в линейной системе с постоянными параметрами.
Зависимость (134) позволяет определить ЛАЧХ оптимальной САУ.
Метод логарифмических частотных характеристик используется для определения частотных передаточных функций корректирующих устройств, приближающих динамические показатели к желаемым. Наиболее эффективно этот метод применяется для синтеза систем с линейными или цифровыми корректирующими устройствами, поскольку в таких системах частотные характеристики звеньев не зависят от амплитуды входных сигналов. Синтез САУ методом логарифмических частотных характеристик включает в себя следующие операции:
На первом этапе по известной передаточной функции неизменяемой части САУ строится ее логарифмическая частотная характеристика . В большинстве случаев достаточно использование асимптотических частотных характеристик.
На втором этапе строится желаемая логарифмическая частотная характеристика САУ , которая удовлетворяла бы поставленным требованиям. Определение вида желаемой ЛАЧХ проводится, исходя из назначения системы, времени переходного процесса, перерегулирования и коэффициентов ошибок. При этом часто используются типовые частотные характеристики для систем с разным порядком астатизма. При построении желаемой ЛАЧХ необходимо быть уверенным, что вид амплитудной характеристики полностью определяет характер переходных процессов, и нет необходимости вводить в рассмотрение фазовую частотную характеристику. Последнее справедливо в случае минимально-фазовых систем, для которых характерно отсутствие нулей и полюсов, расположенных в правой полуплоскости. При выборе желаемых логарифмических амплитудной и фазовой характеристик важно, чтобы последняя обеспечила требуемый запас устойчивости при частоте среза системы. Для этого используют специальные номограммы, вид которых приводится на рис. 1.
Рисунок 16‑1 Кривые для выбора запаса устойчивости по амплитуде (а)и фазе (б) в зависимости от величины перерегулирования
Удовлетворительные качественные показатели САУ в динамических режимах достигаются при пересечении амплитудной характеристики оси абсцисс с наклоном –20 дб/дек.
Рисунок 16‑2 Определение характеристик ПКУ
На последнем этапе из сравнения частотных характеристик некорректированной системы и желаемых частотных характеристик определяются частотные свойства корректирующего устройства. При использовании линейных средств коррекции логарифмическая частотная характеристика последовательного корректирующего устройства (ПКУ) может быть найдена вычитанием ЛАЧХ некорректированной системы из желаемой ЛАЧХ САУ, то есть
Следовательно
Следует отметить, что по передаточной функции последовательного корректирующего устройства легко определить передаточные функции звеньев в цепи прямой или обратной связи, с помощью которых осуществляется коррекция динамических показателей САУ.
Следующим этапом является определение способа реализации, схемы и параметров корректирующего устройства.
Последним этапом синтеза устройства коррекции является проверочный расчет САУ, который заключается в построении графиков переходных процессов для системы с выбранным корректирующим устройством. На этом этапе целесообразно использование средств вычислительной техники и моделирующих программных комплексов VinSim, WorkBench, CircuitMaker, MathCAD.
Синтез линейных САУ
Основные понятия о синтезе систем управления
Все математические задачи, решаемые в теории автоматического управления, можно объединить в два больших класса – задачи анализа и задачи синтеза автоматических систем.
В задачах анализа полностью известна структура системы, заданы все (как правило) параметры системы, и требуется оценить какое-либо ее статистическое или динамическое свойство. К задачам анализа относятся расчет точности в установившихся режимах, определение устойчивости, оценка качества системы.
Задачи синтеза можно рассматривать как обратные задачам анализа: в них требуется определить структуру и параметры системы по заданным показателям качества. Простейшими задачами синтеза являются, например, задачи определения передаточного коэффициента разомкнутого контура по заданной ошибке или условию минимума интегральной оценки.
Под синтезом линейных САУ понимается выбор такой структурной схемы, ее параметров, характеристик, которые отвечают с одной стороны заданным показателям качества и простоты технической реализации и надежности с другой стороны.
Особенности синтеза
САУ включает в себя объект управления и корректирующие устройства (это такие устройства, структура и параметры которых изменяются в соответствие с задачей синтеза).
Задание показателей качества определяется как верхняя граница допустимых показателей качества, т.о. заданные показатели качества определяют собой область принятия решений. Поэтому при синтезе выбирают критерий оптимизации, позволяющий определить однозначный выбор структуры и параметров САР.
Для современных САУ процедура синтеза определяет ориентировочную характеристику САУ, поэтому окончательный результат получается в результате анализа (настройки, моделирования) синтезированной САУ.
Этапы синтеза САУ
Анализируется объект управления, определяются статические и динамические характеристики объекта.
Определяется критерий оптимизации, основанный на заданных показателях качества САУ.
Строится структурная схема САУ, выбираются технические средства ее реализации.
Синтез оптимальной динамической характеристики.
Аппроксимация оптимального динамического режима, т.е. выбор динамических характеристик (желаемых), отвечающих заданным показателям качества и простоте технической реализации корректирующих устройств.
Определение динамических характеристик корректирующих устройств, которые обеспечивают желаемые динамические характеристики всей системы.
Выбор схемы и способа технической реализации корректирующих устройств по заданной динамической характеристике корректирующего устройства.
Анализ синтезированных САУ.
Синтез систем методом ЛАЧХ
Существует два способа включения корректирующих устройств:
Последовательно к объекту управления.
Здесь W 0 (p ) – передаточная функция объекта, а W кор (р) – передаточная функция корректирующего устройства.
Достоинством последовательной схемы включения является простота технической реализации.
Недостатки: высокая чувствительность данной схемы к помехам; сильная зависимость от изменений параметров объекта.
Параллельно к некоторой части объекта.
Д

Недостатки: корректирующее устройство данной схемы реализуется дорогостоящими схемами, в отличие от схемы (1).
В качестве динамических характеристик, по которым осуществляется синтез САУ, выбирается ЛАЧХ разомкнутой системы объекта, т.к. по ней достаточно легко определить параметры объекта.
Желаемая ЛАЧХ
При построении желаемой ЛАЧХ выделяют три диапазона частот:
Низких частот ( с ). Данный диапазон частот отражает статические характеристики.
Диапазон средних частот ( с ). Определяет динамические характеристики объекта при ступенчатом входном воздействии.
Диапазон высоких частот ( с ). Данный диапазон частот не влияет на статику, а определяет динамические характеристики объекта при быстроизменяющемся входном воздействии.
Модальный регулятор.
Является методом корневого синтеза, а именно, по желаемому расположению корней характеристического уравнения на комплексной плоскости строится модальный регулятор, который представляет собой коэффициенты отрицательной обратной связи по каждой динамической переменной.

Дано описание объекта:

Задаёмся видом желаемого полинома D жел (p) – в соответствии с заданными (желаемыми) показателями качества.
Введём обратную связь, вида:

где
 - характеристическое уравнение системы
с регулятором.
- характеристическое уравнение системы
с регулятором.
Пример: Дана система уравнений


n 1 U x 1 x 2 x 3


Нужно рассмотреть матрицу управляемости:

 Система управляема,
так как ранг равен порядку системы
Система управляема,
так как ранг равен порядку системы
Выбираем желаемый полином той же степени, что и система:
D жел (p)=(p+w 0 ) 3 =p 3 +3p 2 w 0 +3pw 0+ w 0 3


 - оценка качества, где
- оценка качества, где
 - время переходного процесса
- время переходного процесса
При выбранном значении
 получаем:
получаем:
K oc1 = 2; K oc2 = -1; K oc3 =5;
Управляемость и наблюдаемость.
Система называется управляемой, если, изменяя любой из входных сигналов можно добиться желаемого значения на выходе системы за конечное время.

без нее система будет неуправляемой, а с ней -
управляемой.
Критерий управляемости.
Для того, чтобы система была управляемая необходимо и достаточно, чтобы ранг матрицы управляемости был равен n (порядок объекта).
В общем случае
матрица управляемости является
прямоугольной. Если система имеет один
вход, то матрица имеет размерность
 .
.
Наблюдаемость.
Система называется наблюдаемой, если по выходным сигналам Y можно восстановить переменные состояния X.
Наблюдаемость, в отличие от измеряемости предполагает не только измерение переменных состояний X, а также вычисления не измеряемых переменных X по измеренным.
Измеряемость – это случай, когда непосредственно можно замерить любую переменную.
Критерий наблюдаемости.
Для того, чтобы система была наблюдаема необходимо и достаточно, чтобы ранг матрицы наблюдаемости был равен n (порядок объекта).



