Analogové (ADC) vstupy regulátoru. Ne každý hned pochopí, co to je a s čím se jí. Pokusím se proto vysvětlit vlastními slovy.
Co je obecně „analogový“ vstup? Regulátor má dva typy vstupů: digitální a analogový. Digitální může nabývat pouze dvou hodnot: nula a jedna. Nula znamená žádné napětí, jedna znamená napětí. Informace jsou přenášeny na digitální vstup v impulsech v průběhu času. Ale analogový vstup je schopen přijmout nejen tyto dvě hodnoty, ale obecně jakékoli napětí.
Regulátor NM8036 má dva analogové vstupy (viz). Každý z těchto vstupů může být napájen libovolným napětím v rozsahu od 0 do napájecího napětí (5 V). Například 1,8 voltu, nebo 3,2 voltu... Zkrátka jakékoli, maximálně však 5 voltů.
Co dělá regulátor s tímto napětím? Velmi jednoduché: měří a zobrazuje jej digitálně. Navíc to dělá v rozsahu od 0 do 1023. Jedná se o binární data (bin-data), ve kterých je horní mez (1023) přirovnána k napětí 5 voltů. Jedná se o analogově-digitální převod (ADC).
Ale skutečné napětí je právě to: skutečné. 5 voltů - jsou 5 voltů. Tato hodnota je zde označována jako "Volty". A je to tak, jsou tam volty.
Zde si ale můžeme toto napětí představit v jiných fyzikálních veličinách (Fyzika). Na vstup jsme například připojili čidlo tlaku nebo vlhkosti, nebo také teplotní čidlo, ale ne digitální, jako u DS1820, ale termistorové. Tento termistorový senzor nám poskytne napětí od 0 do 5 voltů (inženýři elektroniky, nebuďte nadšení! Toto je jen příklad.), ale pro nás je důležité znát teplotu, ne napětí!
Takže tyto hodnoty zkalibrujeme. Spodní hranici nastavíme v nastavení (viz Regulace vytápění privátu. Pokročilý manažer.) např. na 16 stupňů a horní hranici na 30 stupňů. Toto je senzor, který máme, vidíte, připojený. A počet desetinných míst nastavíme na 2. A označíme předponu: C (tedy stupně Celsia).
A co z toho máme? A dostaneme, že když senzor pošle na vstup napětí např. 2,5 V, regulátor vše rychle přepočítá a dá nám tři varianty výsledků: 512 (bin-data), 2,5 V (Voltů) a 23,00 C ( stupňů Celsia ). Takto můžete nakonfigurovat práci s téměř jakýmkoli senzorem, který na svém výstupu produkuje analogovou hodnotu napětí.
Existence dvou analogových vstupů na ovladači nespočívá pouze v možnosti připojení výše uvedených senzorů. Můžete přijít s mnoha schématy, které mohou být velmi užitečné pro různé účely v soukromém domě. Uvedu seznam možných.
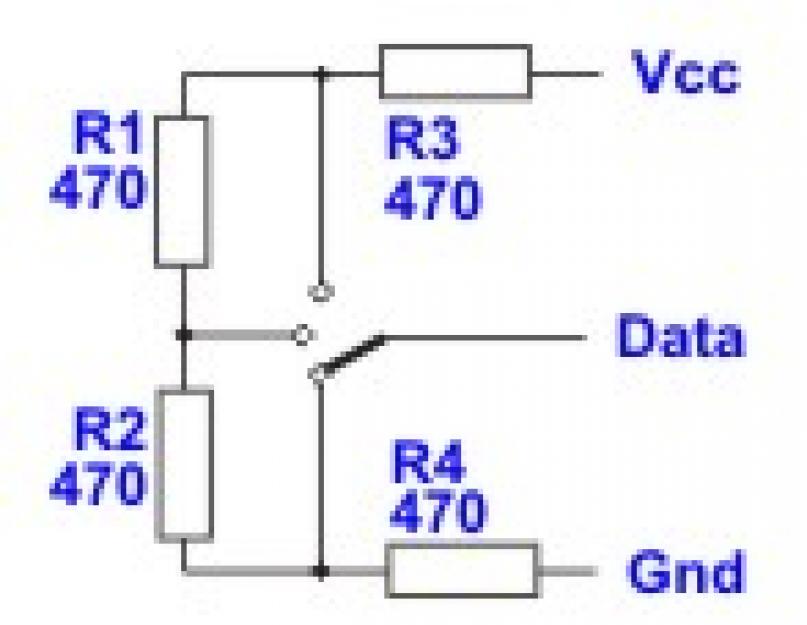
Jednoduchý 2polohový spínač. Datový výstup může mít buď 0 voltů nebo 5 voltů. Je připojeno třemi vodiči: Vcc (+5V), Data (data) a Gnd (společný vodič). S tímto přepínačem můžete nainstalovat dva různé režimy provoz zátěží při programování systému.
 Přepínač pro více poloh může poskytnout možnost naprogramovat více režimů. Tady, řekněme, 3 pozice. Každá pozice má své vlastní výstupní napětí. Nejnižší poloha je výstup 1,25 V, střední 2,5 V a horní 3,75 V. Zvýšením počtu rezistorů v řetězci můžete zvýšit počet poloh přepínače.
Přepínač pro více poloh může poskytnout možnost naprogramovat více režimů. Tady, řekněme, 3 pozice. Každá pozice má své vlastní výstupní napětí. Nejnižší poloha je výstup 1,25 V, střední 2,5 V a horní 3,75 V. Zvýšením počtu rezistorů v řetězci můžete zvýšit počet poloh přepínače.
Jednalo se o možnosti krokového nastavení, ale existuje i možnost hladkého nastavení. Zde je velikost výstupního napětí závislá na poloze jezdce proměnného odporu. Lze použít například pro manuální regulaci teploty. Udělejte program tak, aby udržoval pokojovou teplotu nastavenou regulátorem. Automatická úprava je jedna věc, ale často chcete něco někam otočit, zacvaknout, aby bylo tepleji, nebo naopak chladněji. Člověk je tvor vybíravý.
 Nebo použijte takový obvod k ovládání, řekněme, hladiny vody v nádobě, ve studni... Není to těžké: plovák na niti namotané kolem rukojeti proměnného odporu. Pružinové, samozřejmě. Ale to je tak zběžně, bez podrobného upřesnění.
Nebo použijte takový obvod k ovládání, řekněme, hladiny vody v nádobě, ve studni... Není to těžké: plovák na niti namotané kolem rukojeti proměnného odporu. Pružinové, samozřejmě. Ale to je tak zběžně, bez podrobného upřesnění.
Pokud budete pokračovat ve fantazírování, můžete také měřit úroveň osvětlení správný čas zapnout/vypnout lampu... Zkrátka tyto analogové vstupy mají spoustu možností, NM8036 hravě zvládne mnoho úkolů nejen při ovládání vytápění soukromého domu, ale i při řešení mnoha dalších problémů. O programovacích možnostech si povíme v následujících článcích.
Mimochodem, pokud jde o úpravu teploty v místnosti, existuje velmi dobré řešení, ze kterého jsem převzal. V odpovědi na něčí otázku autor zprávy Brokly (také autor Advanced Manager) uvedl příklad použití analogového vstupu. Cituji to doslovně:
Mohl jsi vymyslet něco ještě složitějšího. Nainstalujte nástěnný nástěnný termostat, připojte jej k analogovému vstupu a nechte opilce, aby si ho sami otočili. Osvoboďte uklízečku a bavte se s opilci. Ano a k ovladači méně práce, termostat fungoval - nemusíte ho zahřívat.
Jak se vám to líbí, mistře? A víš, líbilo se mi to.
Pokračování příště...
Podívejme se na hlavní okruh problémů, které lze přičíst principu fungování odlišné typy. Sekvenční počítání, bitové vyvažování – co se skrývá za těmito slovy? Jaký je princip činnosti mikrokontroléru ADC? Těmito, stejně jako řadou dalších otázek, se budeme v rámci článku zabývat. První tři části budeme věnovat obecné teorii a od čtvrtého podtitulu budeme studovat princip jejich fungování. S pojmy ADC a DAC se můžete setkat v různé literatuře. Způsob fungování těchto zařízení je mírně odlišný, takže si je nepleťte. Článek se tedy podívá z analogové na digitální formu, zatímco DAC pracuje obráceně.
Definice
Než se zamyslíme nad principem fungování ADC, pojďme zjistit, o jaký druh zařízení se jedná. Analogově-digitální převodníky jsou zařízení, která převádějí fyzikální veličinu na odpovídající číselnou reprezentaci. Výchozím parametrem může být téměř cokoliv – proud, napětí, kapacita, odpor, úhel natočení hřídele, frekvence pulzů a tak dále. Pro jistotu ale budeme pracovat pouze s jednou transformací. Toto je "kód napětí". Volba tohoto formátu práce není náhodná. Koneckonců, ADC (princip činnosti tohoto zařízení) a jeho vlastnosti do značné míry závisí na tom, jaký koncept měření je použit. To je chápáno jako proces porovnávání určité hodnoty s dříve zavedeným standardem.
Vlastnosti ADC
Mezi hlavní patří bitová hloubka a převodní frekvence. První je vyjádřen v bitech a druhý v počtech za sekundu. Moderní analogově-digitální převodníky mohou mít 24bitové rozlišení nebo rychlosti převodu dosahující jednotek GSPS. Vezměte prosím na vědomí, že ADC vám může poskytnout vždy pouze jednu charakteristiku. Čím větší jsou jejich ukazatele, tím obtížnější je pracovat se zařízením a samotné zařízení stojí více. Ale naštěstí můžete získat potřebné indikátory bitové hloubky tím, že obětujete rychlost zařízení.
Typy ADC
Princip fungování se u různých skupin zařízení liší. Podíváme se na následující typy:
- S přímou konverzí.
- S postupným přibližováním.
- S paralelním převodem.
- Analogově-digitální převodník s vyrovnáváním náboje (delta-sigma).
- Integrace ADC.
Existuje mnoho dalších typů dopravníků a kombinací, které mají své vlastní speciální vlastnosti s různými architekturami. Ale ty vzorky, které budou zvažovány v rámci článku, jsou zajímavé vzhledem k tomu, že hrají indikativní roli v jejich výklenku zařízení této specifičnosti. Pojďme si proto prostudovat princip fungování ADC a také jeho závislost na fyzickém zařízení.
Přímé analogově-digitální převodníky
Velmi populární se staly v 60. a 70. letech minulého století. V této podobě se vyráběly již od 80. let. Jedná se o velmi jednoduchá, až primitivní zařízení, která se nemohou pochlubit výrazným výkonem. Jejich bitová šířka je obvykle 6-8 bitů a rychlost zřídka přesahuje 1 GSPS.
Princip činnosti ADC tohoto typu je následující: kladné vstupy komparátorů současně přijímají vstupní signál. Na záporné póly je přivedeno napětí o určité velikosti. A pak zařízení určí svůj provozní režim. To se děje díky referenčnímu napětí. Řekněme, že máme zařízení s 8 komparátory. Při použití ½ referenčního napětí se zapnou pouze 4 z nich. Prioritní kodér bude vygenerován a zaznamenán do výstupního registru. Pokud jde o výhody a nevýhody, můžeme říci, že práce umožňuje vytvářet vysokorychlostní zařízení. Ale abyste získali požadovanou bitovou hloubku, musíte tvrdě pracovat.

Obecný vzorec pro počet komparátorů vypadá takto: 2^N. Pod N musíte zadat počet číslic. Výše uvedený příklad lze použít znovu: 2^3=8. Celkem je k získání třetí číslice potřeba 8 komparátorů. Toto je princip fungování ADC, které byly vytvořeny jako první. Není to příliš pohodlné, takže se následně objevily další architektury.
Postupná aproximace analogově-digitálních převodníků
Toto používá algoritmus "vážení". Stručně řečeno, zařízení pracující pomocí této techniky se jednoduše nazývají sériové počítací ADC. Princip činnosti je následující: zařízení změří hodnotu vstupního signálu a poté jej porovná s čísly, která jsou generována určitou metodou:
- Je nastavena polovina možného referenčního napětí.
- Pokud signál překročil mez hodnoty z bodu č. 1, porovnává se s číslem, které leží uprostřed mezi zbývající hodnotou. Takže v našem případě to bude ¾ referenčního napětí. Pokud referenční signál nedosáhne tohoto indikátoru, bude provedeno srovnání s jinou částí intervalu podle stejného principu. V v tomto příkladu toto je ¼ referenčního napětí.
- Krok 2 se musí Nkrát opakovat, což nám dá N bitů výsledku. To je způsobeno provedením N počtu srovnání.
Tento princip fungování umožňuje získat zařízení s relativně vysokou rychlostí převodu, což jsou ADC postupné aproximace. Princip fungování, jak vidíte, je jednoduchý a tato zařízení jsou ideální pro různé případy.

Paralelní A/D převodníky
Fungují podobně jako sériová zařízení. Výpočtový vzorec je (2^H)-1. Pro případ zvažovaný dříve budeme potřebovat (2^3)-1 komparátory. K provozu se používá určité pole těchto zařízení, z nichž každé může porovnávat vstupní a individuální referenční napětí. Paralelní analogově-digitální převodníky jsou poměrně rychlá zařízení. Ale princip konstrukce těchto zařízení je takový, že k udržení jejich funkčnosti je zapotřebí značného výkonu. Proto není vhodné je používat s bateriovým napájením.
Analogově-digitální převodník s bitovým vyvážením
Funguje podle podobného schématu jako předchozí zařízení. Proto, abychom vysvětlili fungování bitového balancování ADC, bude princip fungování pro začátečníky probrán doslova na první pohled. Tato zařízení jsou založena na fenoménu dichotomie. Jinými slovy, provádí se sekvenční srovnání měřená veličina s určitou částí maximální hodnota. Lze použít hodnoty ½, 1/8, 1/16 a tak dále. Proto může analogově-digitální převodník dokončit celý proces v N iteracích (po sobě jdoucích krocích). Navíc H se rovná Kapacita ADC(podívejte se na výše uvedené vzorce). Máme tedy značný zisk v čase, pokud je rychlost zařízení obzvláště důležitá. I přes značnou rychlost se tato zařízení vyznačují také nízkou statickou chybou.

Analogově-digitální převodníky s vyrovnáváním náboje (delta-sigma)
Jedná se o nejzajímavější typ zařízení, a to nejen díky svému principu fungování. Spočívá v porovnání vstupního napětí s tím, co bylo naakumulováno integrátorem. Na vstup jsou přiváděny pulsy se zápornou nebo kladnou polaritou (vše závisí na výsledku předchozí operace). Můžeme tedy říci, že takový analogově-digitální převodník je jednoduchý sledovací systém. Ale to je jen příklad pro srovnání, abyste pochopili ADC. Princip činnosti je systémový, ale pro efektivní fungování tohoto analogově-digitálního převodníku nestačí. Konečným výsledkem je nekonečný proud jedniček a nul, který proudí přes digitální dolní propust. Z nich se vytvoří určitá bitová sekvence. Rozlišují se převodníky ADC prvního a druhého řádu.
Integrace analogově-digitálních převodníků
Toto je poslední zvláštní případ, který bude v článku zvažován. Dále popíšeme princip fungování těchto zařízení, ale na obecné úrovni. Tento ADC je analogově-digitální převodník s integrací push-pull. Podobné zařízení najdete v digitálním multimetru. A není se čemu divit, protože poskytují vysokou přesnost a zároveň dobře potlačují rušení.
Nyní se zaměřme na jeho princip fungování. Spočívá v tom, že vstupní signál nabíjí kondenzátor po pevně stanovenou dobu. Tato perioda je zpravidla jednotkou frekvence sítě, která napájí zařízení (50 Hz nebo 60 Hz). Může být i vícenásobný. Tím jsou potlačeny vysokofrekvenční rušení. Současně je neutralizován vliv nestabilního napětí síťového zdroje elektřiny na přesnost výsledku.

Když skončí doba nabíjení analogově-digitálního převodníku, kondenzátor se začne vybíjet určitou pevnou rychlostí. Interní čítač zařízení počítá počet hodinových impulzů, které jsou během tohoto procesu generovány. Čím delší je tedy časové období, tím významnější jsou ukazatele.
Push-pull integrační ADC jsou vysoce přesné a díky tomu, stejně jako relativně jednoduché konstrukční struktuře, jsou navrženy jako mikroobvody. Hlavní nevýhodou tohoto principu fungování je jeho závislost na indikátoru sítě. Pamatujte, že jeho schopnosti jsou vázány na dobu trvání frekvenčního období zdroje energie.
Takto funguje ADC s dvojitou integrací. Princip činnosti tohoto zařízení i když je poměrně složitý, poskytuje ukazatele kvality. V některých případech je to prostě nutné.
Vybíráme APC s provozním principem, který potřebujeme
Řekněme, že stojíme před určitým úkolem. Jaké zařízení zvolit, aby uspokojilo všechny naše potřeby? Nejprve si povíme něco o rozlišení a přesnosti. Velmi často jsou zmatení, i když v praxi na sobě velmi slabě závisí. Pamatujte, že 12bitový A/D převodník může mít menší přesnost než 8bitový A/D převodník. V tomto případě je rozlišení měřítkem toho, kolik segmentů lze extrahovat ze vstupního rozsahu měřeného signálu. 8bitové ADC tedy mají 2 8 = 256 takových jednotek.
Přesnost je celková odchylka výsledného výsledku převodu od ideální hodnoty, která by měla být při daném vstupním napětí. To znamená, že první parametr charakterizuje potenciální schopnosti, které ADC má, a druhý ukazuje, co máme v praxi. Proto pro nás může být vhodný jednodušší typ (například přímé analogově-digitální převodníky), který uspokojí potřeby díky vysoké přesnosti.

Abyste měli představu o tom, co je potřeba, musíte nejprve vypočítat fyzikální parametry a stavět matematický vzorec interakce. Statické a dynamické chyby jsou v nich důležité, protože při použití různých komponent a principů pro konstrukci zařízení budou mít různý vliv na jeho vlastnosti. Podrobnější informace naleznete v technická dokumentace, kterou nabízí výrobce každého konkrétního zařízení.
Příklad
Pojďme se podívat na SC9711 ADC. Princip fungování tohoto zařízení je složitý vzhledem k jeho velikosti a možnostem. Mimochodem, když mluvíme o tom druhém, je třeba poznamenat, že jsou skutečně rozmanité. Tedy například frekvence možnou práci se pohybuje od 10 Hz do 10 MHz. Jinými slovy, může odebrat 10 milionů vzorků za sekundu! A samotné zařízení není něco pevného, ale má modulární strukturu. Používá se však zpravidla ve složité technologii, kde je třeba pracovat velké množství signály.

Závěr
Jak vidíte, ADC jsou založeny na různých provozních principech. To nám umožňuje vybrat zařízení, která uspokojí vaše potřeby, a zároveň vám umožní moudře nakládat s dostupnými finančními prostředky.
Rozsah analogově-digitálních převodníků je výrazně větší než rozsah DAC. Veškerou rozmanitost jejich typů však lze zredukovat na tři varianty: jedná se o paralelní ADC, postupnou aproximaci ADC a integrační ADC. Pojďme se na ně podívat popořadě.
Paralelní ADC
Paralelní ADC je zrcadlový obraz nejjednoduššího DAC založeného na dekodéru, popsaného v předchozí sekce. V takových ADC je dělič z k stejných rezistorů, ke každému stupni je připojen komparátor, který porovnává napětí na děliči se vstupním signálem. Výstupy komparátorů tvoří jednotný kód, podobný tomu, který se používá k ovládání sloupcových indikátorů v nejjednodušším DAC popsaném dříve. Tyto výstupy jsou připojeny ke kodéru s k vstupů, který převádí tento kód na binární s počtem bitů rovným oе2(k).
Obtíže na této cestě již byly popsány: obvod se ukazuje jako extrémně těžkopádný, pro „-bitový kód“ vyžaduje = 2 „odpory a komparátory, navíc odpory přesně vzájemně přizpůsobené a komparátory také s identickými vlastnosti. Proto se takové ADC s bitovou šířkou větší 8 téměř nevyrábí. Proč se vůbec vyrábějí? Z jednoho prostého důvodu - tento typ ADC je nejrychlejší ze všech, konverze probíhá prakticky okamžitě a je omezená pouze rychlostí použitých komparátorů a použité logiky Skutečná rychlost ADC typu Tai^ro může být desítky a stovky megahertzů (nejextrémnější typy, jako MAX 108, umožňují frekvence až několik gigahertzů.) Všechny ostatní typy ADC, jak uvidíme, fungují mnohem pomaleji.
postupná aproximace ADC
Na postupné aproximační ADC se podíváme trochu podrobněji kvůli jejich praktickému významu. I když v současnosti není nutné takové ADC stavět sami, ale pro úspěšné použití v integrovaném designu byste měli dobře rozumět tomu, jak fungují. Toto je typ ADC, který je obvykle zabudován do mikrokontrolérů (viz kapitoly 19 a 20).
Hlavní složkou postupného aproximačního ADC je DAC s požadovanou bitovou hloubkou (proto jsme uvažovali DAC před ADC). Na jeho digitální vstupy je dodáván kód podle určitého pravidla, které je popsáno níže. Výstup DAC je připojen k jednomu ze vstupů komparátoru, jehož druhý vstup je napájen převedeným napětím. Výsledek porovnání je přiveden do řídicího obvodu, který je připojen k registru generátoru kódu.
Existuje několik možností pro implementaci postupu převodu. Nejjednodušší vypadá takto: za prvé, všechny bity kódu jsou nulové. V prvním cyklu je nejvýznamnější bit nastaven na jedničku. Pokud výstup DAC překročí vstupní napětí, to znamená, že se komparátor přepne do opačného stavu, pak se bit vrátí do stavu logické nuly, jinak zůstane ve stavu logické jedničky. V dalším kroku se postup opakuje pro další nejvyšší číslici. Tato metoda umožňuje v počtu hodinových cyklů rovném počtu bitů vygenerovat v registru kód odpovídající vstupnímu napětí. Metoda je časově celkem ekonomická, ale má jednu podstatnou nevýhodu - pokud se při převodu změní vstupní napětí, může obvod chybovat, někdy až k úplnému selhání. Proto je v takovém obvodu nutné instalovat na vstup zařízení pro ukládání vzorků, o kterém dále. .
V další modifikaci stejného obvodu je pro generování kódů použit reverzní čítač, podobný 561IE11, s požadovaným počtem číslic. Výstup komparátoru se jednoduše připojí ke kolíku přepínání směru počítání. Zpočátku je čítač vynulován ve všech bitech, poté jsou na něj aplikovány hodinové impulsy. Jakmile čítač napočítá na odpovídající kódovou hodnotu a výstup DAC překročí vstupní napětí, komparátor přepne směr počítání a čítač běží pozpátku. Po uplynutí této doby ustálení, pokud se vstupní napětí nezmění, hodnota kódu neustále kolísá v rámci nejméně významné číslice. Zde nejsou přepětí tak špatné, ale dlouhá doba ustálení a předem neznámá doba odezvy na rychlé změny vstupního signálu jsou nevýhodou takového ADC, nazývaného „tracking“.
Nyní o zařízeních pro ukládání vzorků (SSD). V nejjednodušším případě je to stále stejný analog elektronický klíč, na jehož vstup je přiváděn měřený signál a na výstupu je kondenzátor. Před začátkem měření je spínač rozpojen a napětí na kondenzátoru opakuje vstupní napětí se všemi jeho změnami. V okamžiku zahájení měření je klíč zablokován a následně se jako měřené napětí objeví napětí uložené na kondenzátoru a změny na vstupu nemají vliv na měřicí obvod.
Vše se zdá jednoduché, ale přítomnost UVH v první řadě proces značně zpomaluje, protože spínač má konečný odpor a spolu s kondenzátorem tvoří dolní propust, což vyžaduje čas, než se vytvoří novou hodnotu napětí a může zkreslit tvar signálu. Navíc ať je vstupní odpor komparátoru jakkoli velký, je konečný a spínač také nemá v sepnutém stavu nekonečně velký odpor. Někdy obvod obsahuje i prvek pro násilné přenastavení kondenzátoru (vynulování), konečně i kondenzátor má své netěsnosti - to vše nutí kondenzátor zvětšovat kapacitu a dále snižovat rychlost obvodu. Integrované ADC tohoto druhu často dokonce poskytují volbu mezi přesností a rychlostí.
Kromě vzorkování a zadržování vyžadují SAR ADC také čas na výstup dat a přípravu na další cyklus měření. Všechno uvedené důvody vést ke skutečnosti, že nejběžnější 10-12bitové postupné přibližování ADC mají skutečnou provozní rychlost ne vyšší než 50-200 kHz. Jako příklad docela pokročilého modelu uvádíme MAX 1132, který má rozlišení 16 bitů při vzorkovací frekvenci 200 kHz. Postupné aproximační ADC jsou však velmi běžné a používají se tam, kde je vyžadována průměrná přesnost při poměrně vysoké rychlosti.
Integrace ADC
Nejpřesnější a zároveň nejpomalejší jsou integrující ADC. Budeme je analyzovat podrobněji, protože za prvé mohou být v návrhu obvodů docela jednoduché a někdy je dokonce vhodné postavit si takovou obvodovou jednotku sami pomocí diskrétních prvků namísto výběru vhodného čipu, a za druhé, tento typ obvodů ADC se nejčastěji používá v radioamatérské praxi (kromě postupných aproximačních ADC zabudovaných do mikrokontrolérů). Později v této kapitole budeme navrhovat na základě hotového ADC tohoto typu digitální teploměr s poměrně dobrými vlastnostmi.
Ve skutečnosti existuje nejméně tucet různých typů integrujících ADC, ale zde budeme podrobně zvažovat pouze tři varianty. Mimochodem, integrace ADC jsou toho příkladem digitální technologie nedosahuje vždy nejvyšší přesnosti ve srovnání s analogovými - centrální jednotkou těchto, jak jsme již řekli, nejpřesnějších převodníků, je čistě analogový integrátor na operačním zesilovači.
Obvod nejjednoduššího integračního ADC je na Obr. 17.4. Jedná se o tzv. АШ1 s jednoduchou integrací. Na začátku převodu dorazí na vstup C dynamického D klopného obvodu kladná hrana, která nastaví výstup Q do stavu logické jedničky. Je to úroveň aktivace pro prvek „AND-NOT“ a impulsy jsou odesílány na vstup čítače. Současně je přes výstup Q vypnutý tranzistor VT1. Kondenzátor se začne nabíjet ze zdroje stabilního proudu. Pokud se hodnota vstupního měřeného napětí a napětí na kondenzátoru rovná, spustí se komparátor a resetuje spoušť („brána“ na logickém prvku „NAND“ je zablokována, tranzistor se otevře a vybije kondenzátor, čítač je resetováno). Počet pulsů nashromážděných v tomto okamžiku v čítači je úměrný vstupnímu napětí.
Proudový zdroj spolu s kondenzátorem in v tomto případě tvoří tzv. GLIN generátor lineárně se měnícího napětí. Obvod lze zjednodušit, pokud místo zdroje proudu použijeme jednoduchý rezistor napájený stabilním zdrojem napětí, ale protože tvar křivky nárůstu napětí není lineární, ale exponenciální (viz obr. 5.7 v kapitole 5), máme abychom se omezili na malý rozsah vstupních napětí, kde se tvar křivky stále blíží přímce. To se ale v praxi často dělá, proto jsem aktuální zdroj podrobně nezakresloval.
Rýže. 17.4. Jednoduchá integrace ADC
Pokud si přesto nastavíte cíl rozšířit vstupní rozsah až na hodnoty blízké napájecímu napětí, budete muset vytvořit „normální“ zdroj proudu. Použití jednoduchého tranzistoru s efektem pole, jak jsme to udělali v obvodu laboratorní zdroj napájení (obr. 9.11) nepřichází v úvahu, protože se stále jedná o poměrně hrubý zdroj. Na druhou stranu, spíše než oplocení zdroje proudu (např. podle možnosti uvedené na obr. 12.5, d), je snazší zkonstruovat GLIN jiným způsobem, a to formou klasického integrátoru podle obr. . 12.5, b, pouze přidáním resetovacího klíče na konci převodu.
Podrobnosti
Pro reset můžete použít konvenční nízkopříkonový /?-p-/?-tranzistor místo pole s efektem pole, ale rozsah vstupního napětí pak bude také omezen zespodu hodnotou napětí na kolektoru otevřeného tranzistor (přibližně 0,3 V). Proto, když výkon klesne na 5 V, je lepší použít k resetování elektronický klíč, jako je 561 KTZ. Při návrhu takových obvodů na mikrokontrolérech (viz níže) lze stejný pin portu použít k resetování kondenzátoru, který je vstupem komparátoru, pokud je v pracovním cyklu přepnut na vstup a na výstup nulové úrovně pro resetovat.
Schéma na Obr. 17.4 Jedinou výhodou je jednoduchost a mnoho nevýhod. Když se na to podíváte, není jasné, proč jsem dříve chválil vynikající vlastnosti integrace ADC. Jeho hlavní nevýhodou je, že výsledek převodu zde závisí na všem na světě – na stabilitě zdroje proudu i samotného GLINu (a každého jeho prvku zvlášť, primárně kondenzátoru), na stabilitě prahu komparátoru, na stabilitě prahu komparátoru, na stabilitě zdroje proudu a na stabilitě samotného GLINu. na nedokonalosti resetovacího klíče atd. Ještě horší je, že obvod v tomto provedení je spouštěn okamžitou hodnotou vstupního signálu a je tedy velmi náchylný na jeho chvění a jakékoliv rušení obecně. A pokud se náhodně ukáže, že hodinová frekvence je násobkem interferenční frekvence (především frekvence sítě s frekvencí 50 Hz), pak obecně můžeme pokaždé získat hodnoty, které jsou velmi vzdálené pravdě^. Proto je takový obvod vhodný pouze pro měření signálů stejnosměrný proud- pro sledování napětí baterie nebo něco podobného (podobný obvod se například používá v portu počítačové hry pro měření polohy potenciometru páky joysticku přivázaného k motoru).
Transformace přitom trvá od obvyklých hodnot ještě poměrně dlouho hodinová frekvence, při kterých obvod ještě přijatelně funguje, leží v rozmezí maximálně desítek kilohertzů (pokud ovšem nepoužijete konkrétně vysokorychlostní komparátory a logiku), tedy pro dosažení rozlišení osmi číslic (můžete 'stejně nezmáčkněte víc), vzorkovací frekvence bude v nejlepším případě 100 Hz, v praxi ještě méně. Možná můžeme využít této skutečnosti a měřit nikoli okamžitou, ale průměrnou hodnotu signálu za dobu převodu?
To není obtížné - stačí přivést naměřené napětí na vstup GLIN a referenční napětí na komparátor. Poté bude signál integrován během doby převodu a integrován velmi přesně; během této doby obdržíme skutečnou aritmetický průměr signálu. Je ale snadné vidět, že samotná převodní funkce bude inverzní – tedy doba nabíjení (a hodnota výstupního kódu na čítači) bude nepřímo úměrná hodnotě vstupního napětí. To je nepohodlné, protože to značně komplikuje zpracování výsledku. Můžete použít nějakou ošemetnou metodu dělení frekvence pomocí reverzního čítače, můžete také zkusit invertovat vstupní signál a poté jej posunout do kladné oblasti, ale to vše vede k neodůvodněné komplikaci obvodu - samotná přesnost převodu se v žádném případě nezvýší, pouze se zbavíme rušení.
Ze všech těchto důvodů se ADC s jednoduchou integrací přes svou jednoduchost v současné době vůbec nepoužívají a ani se nevyrábějí ve formě specializovaných mikroobvodů. Jedinou oblastí, kde lze takovou metodu doporučit, je použití mikroprocesorů, které mají vestavěný komparátor. V tomto případě pomocí jednoho externího odporu a kondenzátoru můžete získat jednoduchý převodník analogový signál do kódu. Toto doporučení však nyní ztratilo veškerý význam, protože mikrokontroléry jsou k dispozici s vestavěnými „normálními“ ADC bez jakýchkoli vnější prvky a vícekanálový, se zaručenou přesností a rozlišením až 10 a dokonce 12 bitů, což je více než dostačující pro většinu praktických potřeb.
Možná se příběh o ADC s jednou integrací ukázal být příliš dlouhý, ale je to oprávněné, protože nyní víme, o co bychom měli usilovat. A těším se na čtenářův údiv, až se dozví, jak je možné překonat téměř všechny výše uvedené nevýhody, jak se říká, na jeden zátah, a navíc bez přílišného zkomplikování schématu. Integrace ADC by nezískala tak širokou popularitu a zaslouženou pověst jako „nejstabilnější“, kdyby nebylo této okolnosti.
Rýže. 17.5. Dvojí integrace ADC provozní cyklus: 1 - ideální případ; 2 -- když je prahová hodnota komparátoru posunuta; 3 - při změně kapacity kondenzátoru
Myšlenka metody zvané „dvojitá“ nebo „dvoustupňová“ integrace je znázorněna na Obr. 17.5. Podívejme se nejprve na graf označený číslem 1. V první části pracovního cyklu se po pevnou dobu cyklu /2 - /] nabíjí kondenzátor integrátoru proudem, který je určen vstupním (naměřeným) napětím. f/in.V druhé části je tento kondenzátor vybíjen přesně známým proudem, určeným referenčním napětím Uon, dokud se napětí nerovná nule (/3). Čím vyšší je vstupní napětí, tím výše se bude kondenzátor nabíjet v první části a tím déle se bude vybíjet ve druhé. Je snadné ukázat, že poměr časového intervalu /3 ~ ^2 ke známému hodinovému času /2 ~ A bude roven poměru vstupního napětí U^x k referenčnímu napětí Uon. výsledný časový interval /3 ~ t2 obvyklým způsobem pomocí čítače, jak je to provedeno ve schématu na Obr. 17.4, dostaneme na výstupu kód, který je úměrný vstupnímu napětí.
Ve skutečnosti je napětí, na které se kondenzátor vybíjí, nastaveno prahem komparátoru a plechovky obecný případ se lišit od nuly o hodnotu 5 v důsledku „chůze“ prahové hodnoty, například při změně teploty. Ale protože na začátku měřicího cyklu bylo napětí určeno stejnou prahovou hodnotou, pak, jak můžete vidět z grafu 2 na Obr. 17.5, v tomto případě záleží pouze na změně prahu při transformaci. A dokonce i v těch nejnemotornějších ADC tohoto typu nepřesahuje zlomek sekundy, takže tuto změnu lze ignorovat. Výsledek nebude ovlivněn změnou kapacity kondenzátoru, protože v tomto případě se strmost přímky a nabíjení a vybíjení změní ve stejném rozsahu (graf 3).
V nejpřesnějších ADC tohoto typu se navíc provádí cyklus „automatické korekce nuly“, kdy se na vstup přivede nulové napětí a výsledek se pak odečte od hodnoty kódu získané v provozním cyklu. Navíc zde není ani potřeba „quartzizovaná“ frekvence a celý obvod lze řídit z libovolného RC oscilátoru za předpokladu, že hodinový čas /2A a plnicí frekvence „brány“ pro výpočet doby trvání výsledného intervalu / 3 - /2 jsou nastaveny z jednoho a téhož generátoru.
Zázraky se ale nedějí - přesnost a stabilita převodu je zde zcela dána přesností a stabilitou hodnoty Uon. Z toho není úniku, a jak jsme řekli, je to obecná podmínka pro všechny ADC a DAC designy nevyjímaje. Mimochodem, všimněte si, že f/in a Uon dohromady tvoří něco jako neinvertující a invertující vstup operačního zesilovače. Tato analogie je mnohem úplnější, než se zdá, a manipulací s těmito hodnotami můžete s výstupním kódem dělat nejrůznější věci, zejména upravit měřítko transformace na požadovaný rozsah. Další výhodou, kterou lze z tohoto spojení získat, je možnost provádět relativní měření, kdy vstupní a referenční napětí jsou získávány ze stejného zdroje a mají tedy stejnou relativní chybu (něco jako jev odmítnutí společného režimu v operačním systému). zesilovač).
Mimochodem, při integraci ADC tohoto druhu, aby se úplněji potlačilo rušení, je nutné udělat první část integračního cyklu přesně násobkem periody rušení. Potom se do cyklu vejde celočíselný počet interferenčních period a ten se zprůměruje. Uplatňuje se téměř největší vliv rušení sítě frekvence je 50 Hz, takže se snaží dělat frekvenci cyklu v kulatých číslech.
Jednoduchá verze praktického obvodu ADC s dvojitou integrací (konvertor napětí-čas, NVC) je na Obr. 17.6. Počítací část není na obrázku znázorněna. Abyste pochopili, jak obvod funguje, měli byste si uvědomit, že řídicí vstup Y pro klíče typu 590KN2 je inverzní, to znamená, že když je úroveň na řídicím vstupu nízká, klíč je otevřený, a když je vysoký, je uzamčen. .
Podívejme se na pracovní schéma (obr. 17.6, vpravo). V okamžiku záporného poklesu na hodinovém vstupu T je klopný obvod RS nastaven na jedničku na výstupu Q. Protože je vstup T v tuto chvíli na záporné úrovni, otevře se klávesa D1/1, ostatní klávesy jsou zamčené. Kondenzátor je připojen ke zpětné vazbě horního operačního zesilovače (DA1/1) a začíná integrační cyklus vstupního napětí (napětí na kondenzátoru vzroste v absolutní hodnotě, to znamená, že na výstupu DA1/1 klesne, protože integrátor se invertuje). Na konci záporného půlcyklu hodinového kmitočtu je klíč D1/1 zablokován a klíč D1/3 je otevřen, nabitý kondenzátor je připojen ke zpětné vazbě druhého operačního zesilovače (DA1/2). Začne cyklus integrace referenčního napětí (změna napětí na kondenzátoru je v diagramu znázorněna tečkovanou čarou). Vzhledem k tomu, že v prvním operačním zesilovači nyní není žádná zpětná vazba, bude fungovat jako komparátor - nejprve se na jeho výstupu ustaví napětí rovné zápornému zdroji (nebo jemu blízké) a v tuto chvíli bude napětí na kondenzátor se rovná nule, výstup bude prudce spěchat ze záporného na kladné napájení (bude však omezen na úroveň přibližně +0,6 V diodou obsaženou ve zpětné vazbě, která je potřebná, aby se nezdržoval proces přechodu) . Kladná hrana se přenese na nulovací vstup klopného obvodu RS a nastaví jeho výstup Q do stavu logické nuly. V tomto případě spínač D1/2 otevře a zkratuje kondenzátor, čímž se přeruší integrační proces. Na vstupu horního operačního zesilovače bude napětí nastaveno na nulu a na výstupu, obecně řečeno (protože stále neexistuje žádná zpětná vazba), bude neurčité a je konvenčně znázorněno v diagramu jako nulová úroveň. .
Rýže. 17.6. Jednoduchá verze ADC s dvojitou integrací (DIC)
Tento stav trvá do konce periody hodin a při záporné hraně na vstupu T se sepnou spínače D1/3 a D1/2 a vše začne znovu. Na výstupu obvodu se vytvoří kladný napěťový impuls, jehož doba trvání /3 – /2 je úměrná vstupnímu napětí, podle výše formulovaného vztahu.
Obvod je navržen tak, aby získal rozlišení 12 bitů nebo 4096 gradací. Stabilita obvodu přímo závisí na stabilitě rezistorů, takže musí být zvoleny s přesností ne horší než 0,1%, v tomto případě může absolutní přesnost dosáhnout 10 číslic bez dodatečné kalibrace. Uon však také musí mít neméně stabilitu, takže pro její získání by měly být použity přesné referenční zdroje napětí. V tomto případě je vhodný mikroobvod MAX875, který dává výkon 5 V s přesností 0,04%. Podrobný rozbor všech chyb tohoto obvodu, včetně teplotních, by zabral příliš mnoho místa, proto se budeme zabývat pouze principem volby převodního kmitočtu a požadavky na prvky.
Maximální vzorkovací frekvenci lze vypočítat z následujících úvah. Protože máme co do činění s CMOS, budeme brát maximální frekvenci pulsů 1 MHz. Musíme poskytnout 12 bitů, to znamená, že počet impulsů během „brány“ při maximálním možném vstupním napětí rovném referenčnímu napětí by měl být alespoň 4096 kusů. Vydělením 1 MHz tímto číslem dostaneme frekvenci asi 244 Hz, ale musí být ještě poloviční, protože takové cykly musíme mít v pracovní periodě dva - přímou a zpětnou integraci. Celkem dostaneme 122 Hz, což je maximální frekvence s vybranou základnou prvků. Na základě toho byly vybrány hodnoty odporu a kapacita kondenzátoru. Při jejich hodnotách uvedených v diagramu dosáhne napětí na výstupu integrátoru se vstupním napětím 5 V přibližně 9 V během integrační doby rovnající se polovině frekvenční periody 122 Hz.
Vstupní napětí pro tento obvod je omezeno na nulu až asi 4,95 V. Napětí nad touto hodnotou způsobí poruchu obvodu, protože nulovací impulz RC bude stále trvat, když přijde nastavovací impulz. Nulovací impuls by bylo možné snížit např. zavedením „správného“ derivačního řetězce (podle obr. 16.6, a), ale k omezení úrovně vstupního napětí vede jiná okolnost - totiž konečná doba vybití kondenzátoru přes spínač při přivedení obvodu do výchozí stav. S prvky použitými v obvodu a za předpokladu, že je vybití dostatečně úplné, to bude nejméně 20-30 mikrosekund (odpor spínače je asi 50 Ohmů), tedy až 1 % maximální doby trvání, což omezuje provozní doba impulsu a maximální napětí přibližně na tuto hodnotu. Můžete se toho zbavit pouze tím, že zkomplikujete obvod a zavedete další interval speciálně pro nulování - to je to, co dělají v sériových ADC.
O výběru prvků. Na uvedených frekvencích musí být rychlost nárůstu signálu na výstupu horního operačního zesilovače v obvodu, který slouží jako komparátor, taková, aby se signál změnil ze saturačního napětí na nulu během maximálně jednoho pulzu frekvence počítání, trvající 1 μs. To znamená, že rychlost přeběhu musí být alespoň 10 V/μs, jinak dostaneme chybu kvůli nepřesnému určení okamžiku, kdy integrace končí (stejný požadavek platí pro rychlost odezvy spínače). Druhým požadavkem na operační zesilovač je, že pro přesnější integraci je žádoucí dostatečně nízký vstupní předpětí, ne více než několik nanoampérů. Vypočítává se na základě hodnoty maximální proud integrace, v tomto případě asi 250 μA, děleno stejnou hodnotou 12 číslic, tedy 4096. Vstupní proud operačního zesilovače musí splňovat podmínku „mnohem menší“ než výsledná hodnota asi 60 nA.
Vezmeme-li v úvahu přípustné napájecí napětí (alespoň 12 V), pak zadané požadavky nesplní mnoho operačních zesilovačů. Čip OPA2132 (dva OPA132 v jednom pouzdru DIP-8) od Texas Instruments je přesný operační zesilovač s vysokou rychlostí (šířka pásma 8 MHz, rychlost přeběhu až 20 V/μs), velmi nízkým vstupním předpětím (50 pA) a vysoké přípustné napájecí napětí až ±18 V. Z klasických domácích operačních zesilovačů se do koridoru požadavků s trochou úsilí vejdou 544UD2 nebo některé operační zesilovače řady 574. Spektrum vhodných čipů lze však výrazně rozšířit, pokud napájecí napětí je sníženo na ±5 V (v tomto případě se přípustný rozsah vstupního napětí nemusí nutně snížit, protože může překročit napájecí napětí, je jednoduše nepohodlné manipulovat s mnoha zdroji) a/nebo snížit frekvenci počítání, např. například na 100 kHz (vzorkovací frekvence klesne na 12 Hz a požadavky na rychlost operačního zesilovače se odpovídajícím způsobem sníží). To vše ilustruje výzvy, které musí konstruktéři při navrhování takových integrovaných ADC překonat, a vysvětluje, proč integrační ADC obvykle fungují tak pomalu – většina přesných ADC má vzorkovací frekvence ne větší než několik desítek nebo stovek hertzů.
Námi navržený ADC patří k typu NVD převodníků napětí-čas. V/F převodníky byly v minulosti široce používány (většinou založené na čipu 555, viz kapitola 16), ale většina implementací trpí stejnou nevýhodou jako jednorázový integrátor, to znamená, že jejich přesnost závisí přímo na kvalitě komponenty. Nyní se podíváme na integrační převodník, který také využívá dvojitou integraci, ale jeho výstupem není časový interval, který je třeba ještě počítat, ale číselně-pulzní kód, tedy okamžitě počet pulzů za určitou periodu čas, úměrný vstupnímu napětí. Toto není frekvence, jak by si někdo mohl myslet, nebo spíše ne tak docela frekvence.
ADC tohoto typu (konvertory napětí na kód, PNC) se také nazývají převodníky delta-sigma nebo ADC vyrovnávající náboj. Jsou široce používány v integrovaném designu; většina ADC s nejvyšším bitem je postavena tímto způsobem. Nebudu vykreslovat podrobné schéma s uvedením typů součástek a vývodů, protože zásady pro výběr součástek silně závisí na požadované přesnosti a rozlišení (bitové hloubce) a není žádný zvláštní důvod stavět takové obvody sami.
Rýže. 17.7. Princip činnosti vyrovnávání náboje ADC
Schematický diagram činnosti PNC je znázorněn na Obr. 17.7. Funguje následovně. Jakmile napětí na výstupu integrátoru DA1 klesne pod nulu, komparátor D1 se přepne a na vstup čítače a současně do spínače začnou přicházet hodinové impulsy, které komutují zdroj referenčního proudu do součtového bodu. integrátora. Vstupní proud Dx a reference /op mají různá znamení a referenční má větší hodnotu, takže s každým hodinovým impulsem se napětí na kondenzátoru sníží a na výstupu integrátoru bude mít tendenci k nule. Jakmile opět dosáhne nuly, komparátor se přepne a hodinové impulsy přestanou proudit do čítače a spínače. Náboj předávaný integrátoru pro každý hodinový impuls je přesně stejný, takže počet takových hodinových impulsů za jednotku času N potřebných k vyrovnání náboje přenášeného zdrojem vstupního napětí bude přesně úměrný vstupnímu napětí. Rezistory pro nastavení proudu v obvodech vstupního a referenčního napětí se samozřejmě nemusí navzájem rovnat, ale v každém případě bude číslo N úměrné vstupnímu proudu a nepřímo úměrné referenčnímu proudu, pokud poměr /op ^ /in je dodržen. pokud jsou stejné, bude počet impulsů N za sekundu roven hodinové frekvenci. Manipulací s hodnotou Uon a hodnotami rezistoru lze získat různé měřítko. Všimněte si, že impulsy na vstupu čítače, představující číslo N, mohou být nerovnoměrně rozloženy v čase, a tím se PNC liší od PNC.
Zde závisí přesnost převodu téměř výhradně na stabilitě /op (Uon) - samozřejmě za předpokladu, že zbývající komponenty jsou vybrány pro rychlost v souladu s doporučeními pro ADC s dvojitou integrací. Autor těchto řádků postavil schéma takové PNK na nejobyčejnějších lidech prvky-klíče 590KN2, op-amp 544UD1 a CMOS řady 561, jako zdroj proudu byl použit obvod podobný obr. 12,5, g na operačním zesilovači 140UD20 a zenerově diodě KS 170. Při taktovací frekvenci 2048 Hz (tedy rozlišení 11 bitů s dobou měření 1 s) však nebyla stabilita obvodu žádná horší než 3 kódové jednotky (0,15 %) v rozsahu od -18 do +40 stupňů! A pokud pečlivě zvážíte otázku stability a rychlosti prvků, můžete získat něco jako MAX 1400 precizní 18bitový ADC s rychlostí 4800 vzorků za sekundu.
Úzkopásmový náhodný proces
Literatura: [L.1], str. 177-180 [L.2], str. 457-460 [L.3], str. 106-109 Náhodný proces, jehož energetické spektrum je soustředěno v relativně úzkém kmitočtu pásmo blízké určité frekvenci Uveďme některé vztahy charakterizující a……..
Literatura: [L.2], str. 141-142 (metoda polohového integrálu, Duhamelova integrální metoda) je založena na zobrazení vstupního signálu obvodu jako součtu elementárních signálů ve tvaru jediného skoku nebo velmi krátký puls (– funkce) ……..
Uvažujme proces vzniku elektromagnetických vln na příkladu antény symetrického nebo půlvlnného vibrátoru napájeného uprostřed ze zdroje střídavé napětí UT. Radiační proces elektrické pole a změna napětí zdroje Ur (generátor)…….
Ahoj všichni. Dnes se dotkneme vážného tématu jménem ADC. Jako vždy začnu charakteristikami ADC, jako příklad použiji ATmega8. A tak je na palubě 6kanálový analogově-digitální převodník (ADC), který má 4 kanály s 10bitovou přesností a 2 kanály s 8bitovou přesností.
Co tedy znamená „10bitová přesnost“? To znamená, že měření bude rozděleno na 2 10 částí, a aby bylo možné určit krok měření, musíte vydělit napětí ADC 2 10 = 1023 (protože počet je od 0), například pokud je naměřené napětí 2,56V, pak náš krok bude 2,56/1023=0,0025V. Dále budete muset krok jednoduše vynásobit hodnotou registrů ADCH (nejvýznamnější bit) a ADCL (nízký bit), kde je uložen výsledek převodu.

Nyní podrobněji:
Pro ovládání ADC musíme zapsat potřebná čísla do řídicích registrů ADC nazvaných ADMUX a ADCSRA(ADCSR)
ADMUX – registr ADC multiplexeru.
Bity 7:6 (REFS1:REFS0) - bity výběru referenčního napětí. Pokud tyto bity změníme během převodu, změny se projeví až po aktuálním převodu. Referenční napětí lze zvolit z AVcc (napájecí napětí), AREF nebo interní zdroj referenční napětí 2,56V.
Výprask 7:6
REFS1:REFS0
00 AREF
01 AVcc, s externím kondenzátorem na AREF
10 Rezerva
11 Interní zdroj 2,56V, s externím kondenzátorem na AREF
Bit 5 – ADLAR. Určuje, jak bude výsledek zapsán do registrů

Bity 3:0 – MUX3:MUX0 – Bity výběru kanálu.
MUX 3:0
0000ADC0
0001ADC1
0010ADC2
0011ADC3
0100ADC4
0101ADC5
0110ADC6
0111ADC7
Dalším registrem je ADCSRA, kde jsou uložena hlavní nastavení ADC
Bit 7 – ADEN. rozlišení ADC.
0 – ADC deaktivováno
1 – ADC povoleno
Bit 6 – ADSC. Spuštění konverze (v režimu jednorázové konverze)
0 – konverze dokončena
1 – zahájení konverze
Bit 5 – ADFR. Výběr provozního režimu ADC
0 – režim jednoduché konverze
1 – režim kontinuální konverze
Bit 4 – ADIF. Příznak přerušení ADC. Bit je nastaven po dokončení převodu.
Bit 3 – ADIE. Povolit přerušení ADC
0 – přerušení zakázáno
1 – přerušení povoleno
Po dokončení převodu se vygeneruje přerušení ADC (pokud je povoleno).
Bity 2:1 – ADPS2:ADPS0. Taktovací frekvence ADC, nebo spíše dělič frekvence hodin MPS
ADPS2:0
000 2
001 2
010 4
011 8
100 16
101 32
110 64
111 128
Čím vyšší frekvence, tím rychlejší převod, ale větší chyba.
Takto probíhá transformace

No, jako příklad si udělejme 10V voltmetr.
Část výpočtu bude vypadat takto:
Použijeme vysoký bajt ADCH, takže počet měření bude 2 8 = 255. Referenční napětí je vnitřní zdroj 2,56V. Dále vypočítáme krok 2,56/255=1mV. Abychom mohli změřit našich 10V, musíme nainstalovat dělič napětí, pomocí jednoduchých výpočtů vybereme nejvěrohodnější odpory na 56KOhm a 15KOhm, pak je náš koeficient 4,73. Výsledný vzorec vypadá takto
Hodnota ve voltech = ADCH*0,01*4,73;

Je tam chyba jedné desetiny, protože... Dělič není zvolen ideálně (pokud někdo chce obvod sestavit, lze nainstalovat trimr). Jen nezapomeňte nainstalovat kapacitně-indukční filtr.
Nyní softwarová část:
Jako vždy vytvoříme projekt v CodeVision, vše smažeme a napíšeme:
// s knihovnami #include je vše jasné
Jít na to!
Pokud chcete další podrobnosti, přečtěte si datový list nebo přejděte na fórum.
Tento článek pojednává o hlavních problémech týkajících se principu fungování různých typů ADC. Zároveň některé důležité teoretické výpočty týkající se matematický popis analogově-digitální konverze zůstala mimo rozsah článku, ale jsou uvedeny odkazy, kde může čtenář, který má zájem, najít hlubší diskusi o teoretických aspektech fungování ADC. Článek je tedy spíše o pochopení obecných principů fungování ADC než teoretický rozbor jejich práce.
Úvod
Jako výchozí bod definujeme analogově-digitální konverzi. Analogově-digitální převod je proces převodu vstupní fyzikální veličiny na její číselnou reprezentaci. Analogově-digitální převodník je zařízení, které takový převod provádí. Formálně může být vstupní hodnota ADC libovolná Fyzické množství– napětí, proud, odpor, kapacita, opakovací frekvence pulsů, úhel natočení hřídele atd. Pro upřesnění však v následujícím budeme pod ADC mínit výhradně převodníky napětí na kód.
Pojem analogově-digitální konverze úzce souvisí s pojmem měření. Měřením rozumíme proces porovnávání naměřené hodnoty s nějakým standardem, při analogově-digitálním převodu se vstupní hodnota porovnává s nějakou referenční hodnotou (obvykle referenční napětí). Analogově-digitální převod lze tedy považovat za měření hodnoty vstupního signálu a vztahují se na něj všechny pojmy z metrologie, jako jsou chyby měření.
Hlavní charakteristiky ADC
ADC má mnoho vlastností, z nichž hlavní jsou převodní frekvence a bitová hloubka. Konverzní frekvence je obvykle vyjádřena ve vzorcích za sekundu (SPS) a bitová hloubka je v bitech. Moderní ADC mohou mít bitovou šířku až 24 bitů a rychlost převodu až jednotek GSPS (samozřejmě ne současně). Čím vyšší je rychlost a bitová kapacita, tím obtížnější je získat požadované vlastnosti, tím je převodník dražší a složitější. Rychlost převodu a bitová hloubka spolu určitým způsobem souvisí a my můžeme obětováním rychlosti zvýšit efektivní bitovou hloubku převodu.
Typy ADC
Existuje mnoho typů ADC, ale pro účely tohoto článku se omezíme na zvážení pouze následujících typů:
- Paralelní konverze ADC (přímá konverze, flash ADC)
- Postupná aproximace ADC (SAR ADC)
- delta-sigma ADC (charge-balanced ADC)
ADC přímé (paralelní) konverze mají nejvyšší rychlost a nejnižší bitovou hloubku. Například paralelní převod ADC TLC5540 od Texas Instruments má rychlost 40MSPS pouze s 8 bity. ADC tohoto typu mohou mít rychlost konverze až 1 GSPS. Zde lze poznamenat, že zřetězené ADC mají ještě větší rychlost, ale jsou kombinací několika ADC s nižší rychlostí a jejich uvažování je nad rámec tohoto článku.
Střední výklenek v řadě bit-rate-speed je obsazen postupnými aproximačními ADC. Typické hodnoty jsou 12-18 bitů s převodní frekvencí 100KSPS-1MSPS.
Nejvyšší přesnosti dosahují sigma-delta ADC s bitovou šířkou až 24 bitů včetně a rychlostí od jednotek SPS po jednotky KSPS.
Dalším typem ADC, který našel využití v nedávné minulosti, je integrační ADC. Integrační ADC byly nyní téměř zcela nahrazeny jinými typy ADC, ale lze je nalézt ve starších měřicích přístrojích.
Přímá konverze ADC
ADC s přímou konverzí se rozšířily v letech 1960-1970 a začaly se vyrábět ve formě integrované obvody v 80. letech 20. století. Často se používají jako součást „potrubních“ ADC (v tomto článku nejsou diskutovány) a mají kapacitu 6-8 bitů při rychlosti až 1 GSPS.
Architektura ADC přímé konverze je na Obr. 1

Rýže. 1. Strukturální schéma Přímá konverze ADC
Princip činnosti ADC je extrémně jednoduchý: vstupní signál je přiváděn současně do všech „kladných“ vstupů komparátorů a na „záporné“ je přiváděna řada napětí, získaná z referenčního napětí jejich dělením odpory. R. Pro obvod na Obr. 1 bude tento řádek vypadat takto: (1/16, 3/16, 5/16, 7/16, 9/16, 11/16, 13/16) Uref, kde Uref je referenční napětí ADC.
Nechat na ADC vstup je aplikováno napětí rovné 1/2 Uref. Pak budou fungovat první 4 komparátory (pokud počítáte odspoda), na jejich výstupech se objeví logické. Prioritní kodér vytvoří binární kód ze „sloupce“ jedniček, který je zachycen ve výstupním registru.
Nyní jsou jasné výhody a nevýhody takového převodníku. Všechny komparátory pracují paralelně, doba zpoždění obvodu je rovna době zpoždění v jednom komparátoru plus doba zpoždění v kodéru. Komparátor a kodér lze vyrobit velmi rychle, v důsledku toho má celý obvod velmi vysoký výkon.
Ale k získání N bitů je potřeba 2^N komparátorů (a složitost kodéru také roste s 2^N). Schéma na Obr. 1. obsahuje 8 komparátorů a má 3 bity, k získání 8 bitů potřebujete 256 komparátorů, na 10 bitů - 1024 komparátorů, na 24bitový ADC by jich bylo potřeba přes 16 milionů.Takových výšin však technologie ještě nedosáhla.
postupná aproximace ADC
Analogově-digitální převodník s postupným aproximačním registrem (SAR) měří velikost vstupního signálu provedením série sekvenčních „vážení“, tedy porovnání hodnoty vstupního napětí se sérií hodnot generovaných následovně:
1. v prvním kroku je výstup vestavěného digitálně-analogového převodníku nastaven na hodnotu rovnou 1/2Uref (dále předpokládáme, že signál je v intervalu (0 – Uref).
2. je-li signál větší než tato hodnota, porovná se s napětím ležícím uprostřed zbývajícího intervalu, tj. v tomto případě 3/4 Uref. Pokud je signál menší zavedená úroveň, pak bude další srovnání provedeno s méně než polovinou zbývajícího intervalu (tj. s úrovní 1/4Uref).
3. Krok 2 se N-krát opakuje. N porovnání („vážení“) tedy produkuje N bitů výsledku.

Rýže. 2. Blokové schéma postupné aproximace ADC.
Postupná aproximace ADC se tedy skládá z následujících uzlů:
1. Komparátor. Porovnává vstupní hodnotu a aktuální hodnotu „vážného“ napětí (na obr. 2 označeno trojúhelníkem).
2. Digitální převodník na analogový (DAC). Generuje napěťovou „váhu“ na základě digitálního kódu přijatého na vstupu.
3. Registr postupného přiblížení (SAR). Implementuje postupný aproximační algoritmus, generující aktuální hodnotu kódu přiváděného na vstup DAC. Všechny jsou po něm pojmenovány tato architektura ADC.
4. Schéma Vzorkování/Podržení (Sample/Hold, S/H). Pro činnost tohoto ADC je zásadně důležité, aby vstupní napětí zůstalo konstantní po celou dobu převodního cyklu. Nicméně „skutečné“ signály mají tendenci se v průběhu času měnit. Obvod sample-and-hold si „pamatuje“ aktuální hodnotu analogového signálu a udržuje ji nezměněnou po celý provozní cyklus zařízení.
Výhoda zařízení je relativně vysoká rychlost konverze: Doba konverze N-bitového ADC je N hodinových cyklů. Přesnost převodu je omezena přesností interního DAC a může být 16-18 bitů (nyní se začaly objevovat 24bitové SAR ADC, např. AD7766 a AD7767).
Delta-Sigma ADC
Konečně nejzajímavějším typem ADC je sigma-delta ADC, v literatuře někdy nazývaný nábojově vyvážený ADC. Blokové schéma sigma-delta ADC je znázorněno na Obr. 3.

Obr.3. Blokové schéma sigma-delta ADC.
Princip činnosti tohoto ADC je poněkud složitější než u jiných typů ADC. Jeho podstatou je, že se vstupní napětí porovnává s hodnotou napětí akumulovanou integrátorem. Pulsy s kladnou nebo zápornou polaritou jsou přiváděny na vstup integrátoru v závislosti na výsledku porovnání. Tento ADC je tedy jednoduchý sledovací systém: napětí na výstupu integrátoru „sleduje“ vstupní napětí (obr. 4). Výsledkem tohoto obvodu je proud nul a jedniček na výstupu komparátoru, který pak prochází digitální dolní propustí, což má za následek N-bitový výsledek. LPF na Obr. 3. V kombinaci s „decimátorem“, zařízením, které snižuje frekvenci čtení jejich „decimováním“.

Rýže. 4. Sigma-delta ADC jako sledovací systém
Pro přesnost prezentace je třeba říci, že na Obr. Obrázek 3 ukazuje blokové schéma sigma-delta ADC prvního řádu. ADC sigma-delta druhého řádu má dva integrátory a dvě smyčky zpětná vazba, ale nebude zde uvažován. Zájemci o toto téma mohou odkazovat.
Na Obr. Obrázek 5 ukazuje signály v ADC na nulové vstupní úrovni (nahoře) a na úrovni Vref/2 (dole).

Rýže. 5. Signály v ADC na různých úrovních vstupního signálu.
Nyní, aniž bychom se pouštěli do složité matematické analýzy, se pokusme pochopit, proč mají sigma-delta ADC velmi nízkou hladinu šumu.
Uvažujme blokové schéma sigma-delta modulátoru znázorněného na Obr. 3 a předložte jej v této podobě (obr. 6):

Rýže. 6. Blokové schéma sigma-delta modulátoru
Zde je komparátor reprezentován jako sčítačka, která přidává spojitý požadovaný signál a kvantizační šum.
Nechť má integrátor přenosovou funkci 1/s. Poté, reprezentující užitečný signál jako X(s), výstup sigma-delta modulátoru jako Y(s) a kvantizační šum jako E(s), získáme přenosovou funkci ADC:
Y(s) = X(s)/(s+1) + E(s)s/(s+1)
To znamená, že ve skutečnosti je sigma-delta modulátor dolní propustí (1/(s+1)) pro užitečný signál a filtr vysoké frekvence(s/(s+1)) pro šum, přičemž oba filtry mají stejnou mezní frekvenci. Šum soustředěný ve vysokofrekvenční oblasti spektra snadno odstraní digitální dolní propust, která je umístěna za modulátorem.

Rýže. 7. Fenomén „posídlení“ šumu do vysokofrekvenční části spektra
Je však třeba chápat, že se jedná o extrémně zjednodušené vysvětlení fenoménu tvarování šumu v sigma-delta ADC.
Hlavní výhodou sigma-delta ADC je tedy jeho vysoká přesnost díky extrémně nízké úrovni vlastního šumu. Pro dosažení vysoké přesnosti je však nutné, aby mezní frekvence digitálního filtru byla co nejnižší, mnohonásobně menší než pracovní frekvence sigma-delta modulátoru. Proto mají sigma-delta ADC nízkou rychlost konverze.
Mohou být použity v audiotechnice, ale jejich hlavní použití je v průmyslové automatizaci pro převod signálů snímačů, v měřicích přístrojích a v dalších aplikacích, kde je vyžadována vysoká přesnost. ale vysoká rychlost není nutná.
Trocha historie
Nejstarší zmínka o ADC v historii je pravděpodobně patent Paula M. Raineyho, „Facsimile Telegraph System“, U.S. Patent 1 608 527, podaný 20. července 1921, vydán 30. listopadu 1926. Zařízení zobrazené v patentu je ve skutečnosti 5bitový ADC s přímou konverzí.

Rýže. 8. První patent pro ADC

Rýže. 9. Přímá konverze ADC (1975)
Zařízení znázorněné na obrázku je přímou konverzí ADC MOD-4100 vyrobenou společností Computer Labs, vyrobeno v roce 1975, sestavené pomocí diskrétních komparátorů. Komparátorů je 16 (jsou umístěny v půlkruhu, aby se vyrovnalo zpoždění šíření signálu na každý komparátor), proto má ADC šířku pouze 4 bity. Rychlost převodu 100 MSPS, spotřeba 14 wattů.
Následující obrázek ukazuje pokročilou verzi ADC pro přímou konverzi.

Rýže. 10. Přímá konverze ADC (1970)
VHS-630 z roku 1970, vyrobený společností Computer Labs, obsahoval 64 komparátorů, byl 6bitový, 30MSPS a spotřeboval 100 wattů (verze VHS-675 z roku 1975 měla 75 MSPS a spotřebovala 130 wattů).
Literatura
W. Kester. ADC Architectures I: Flash Converter. Analogová zařízení, výukový program MT-020.



