Заставить похудеть конструкции с применением RS-485 просто, если вы понимаете, как в то же самое время сохранить хорошее качество связи. Эта статья охватывает факты, мифы и злые шутки, о которых вам следует знать для достижения этой цели.
В системах промышленной автоматизации и автоматизации зданий применяется ряд удаленных устройств сбора данных, которые передают и принимают информацию через центральный модуль, предоставляющий доступ к данным пользователям и другим процессорам. Регистраторы данных и считывающие устройства типичны для таких приложений. Почти идеальная линия передачи данных для этих целей определена стандартом RS-485, который связывает устройства сбора данных кабелем на основе витой пары.
Поскольку многие из устройств сбора и накопления данных в сетях RS-485 являются компактными автономными устройствами с батарейным питанием, для контроля за их тепловыделением и увеличения срока службы батарей необходимо принятие мер по снижению их энергопотребления. Точно так же экономия энергии важна для носимых устройств и других приложений, в которых интерфейс RS-485 используется для загрузки данных в центральный процессор.
Следующий раздел предназначен в первую очередь для тех, кто не знаком с RS-485.
RS-485: история и описание
Стандарт RS-485 был совместно разработан двумя ассоциациями производителей: Ассоциацией электронной промышленности (EIA - Electronics Industries Association) и Ассоциацией промышленности средств связи (TIA - Telecommunications Industry Associastion). EIA некогда маркировала все свои стандарты префиксом "RS" (Рекомендованный стандарт). Многие инженеры продолжают использовать это обозначение, однако EIA/TIA официально заменил "RS" на "EIA/TIA" с целью облегчить идентификацию происхождения своих стандартов. На сегодняшний день, различные расширения стандарта RS-485 охватывают широкое разнообразие приложений.
Стандарты RS-485 и RS-422 имеют много общего, и поэтому их часто путают. Таблица 1 сравнивает их. RS-485, определяющий двунаправленную полудуплексную передачу данных, является единственным стандартом EIA/TIA, допускающим множественные приемники и драйверы в шинных конфигурациях. EIA/TIA-422, с другой стороны, определяет единственный однонаправленный драйвер с множественными приемниками. Элементы RS-485 обратно совместимы и взаимозаменяемы со своими двойниками из RS-422, однако драйверы RS-422 не должны использоваться в системах на основе RS-485, поскольку они не могут отказаться от управления шиной.
Таблица 1. Стандарты RS-485 и RS-422
| RS-422 | RS-485 | |
| Режим работы | Дифференциальный | Дифференциальный |
| Допустимое число Tx и Rx | 1 Tx, 10 Rx | 32 Tx, 32 Rx |
| Максимальная длина кабеля | 1200 м | 1200 м |
| Максимальная скорость передачи данных | 10 Мбит/с | 10 Мбит/с |
| Минимальный выходной диапазон драйвера | ± 2 В | ± 1.5 В |
| Максимальный выходной диапазон драйвера | ± 5 В | ± 5 В |
| Максимальный ток короткого замыкания драйвера | 150 мА | 250 мА |
| Сопротивление нагрузки Tx | 100 Ом | 54 Ом |
| Чувствительность по входу Rx | ± 200 мВ | ± 200 мВ |
| Максимальное входное сопротивление Rx | 4 кОм | 12 кОм |
| Диапазон напряжений входного сигнала Rx | ± 7 В | от -7 В до +12 В |
| Уровень логической единицы Rx | > 200 мВ | > 200 мВ |
| Уровень логического нуля Rx | < 200 мВ | < 200 мВ |
Защита от электростатических разрядов
Дифференциальная передача сигнала в системах на основе RS-485 и RS-422 обеспечивает надежную передачу данных в присутствии шумов, а дифференциальные входы их приемников кроме того могут подавлять значительные синфазные напряжения. Однако для защиты от значительно больших уровней напряжений, которые обычно ассоциируются с электростатическим разрядом (ESD), необходимо принимать дополнительные меры.
Заряженная емкость человеческого тела позволяет человеку уничтожать интегральную схему простым ее касанием. Такой контакт запросто может произойти при прокладке и подключении интерфейсного кабеля. Для защиты от таких разрушительных воздействий, интерфейсные микросхемы MAXIM включают "ESD структуры". Эти структуры защищают выходы передатчиков и входы приемников в приемопередатчиках RS-485 от уровней ESD до ±15кВ.
Чтобы гарантировать заявленную защиту от ESD, Maxim осуществляет многократное тестирование положительных и отрицательных выводов питания с шагом 200В, для проверки последовательности уровней до ±15кВ. Устройства этого класса (отвечающие спецификациям модели человеческого тела (Human Body Model) или IEC 1000-4-2) маркируются в обозначении изделия дополнительным суффиксом "E".
Допустимая нагрузка драйвера RS-485/RS-422 количественно определяется в терминах единичной нагрузки, которая, в свою очередь, определяется как входной импеданс одного стандартного приемника RS-485 (12кОм). Таким образом, стандартный драйвер RS-485 может управлять 32 единичными нагрузками (32 параллельных 12-килоомных нагрузки). Однако для некоторых приемников RS-485 входное сопротивление является более высоким - 48 кОм (1/4 единичной нагрузки) или даже 96 кОм (1/8 единичной нагрузки) - и, соответственно, к одной шине могут быть подключены сразу 128 или 256 таких приемников. Вы можете подключить любую комбинацию типов приемников, если их параллельный импеданс не превышает 32 единичных нагрузки (т.е. суммарное сопротивление не меньше 375 Ом).
Последствия высоких скоростей
Более быстрые передачи требуют более высоких скоростей нарастания напряжения на выходе драйвера, а они, в свою очередь, производят большие уровни электромагнитных помех (EMI). Некоторые приемопередатчики RS-485 сводят EMI к минимуму, ограничивая их скорости нарастания. Меньшие скорости нарастания также помогают контролировать отражения, вызванные быстрыми переходными процессами, высокими скоростями передачи данных или длинными линиями связи. Основой для минимизации отражений является использование согласующих резисторов с номиналами, соответствующими волновому сопротивлению кабеля. Для обычных кабелей RS-485 (витая пара проводов 24AWG) это означает размещение 120-омных резисторов на обоих концах линии связи.
Куда уходит вся мощность?
Очевидным источником потери мощности является ток покоя приемопередатчика (IQ), который в современных устройствах значительно снижен. В таблице 2 токи покоя малопотребляющих КМОП приемопередатчиков сравниваются с являющимся промышленным стандартом устройством 75176.
Таблица 2. Сравнение токов утечки для различных приемопередатчиков RS-485
Другая характеристика энергопотребления приемопередатчиков RS-485 проявляется при отсутствии нагрузки, разрешении выхода драйвера и присутствии периодического входного сигнала. Поскольку открытых линий в RS-485 нужно избегать всегда, драйверы "долбят" свои выходные структуры при каждом переключении выхода. Это короткое включение обоих выходных транзисторов немедленно вызывает бросок тока питания. Достаточно большой входной конденсатор сглаживает эти броски, производя действующий (RMS) ток, который растет вместе со скоростью передачи данных до своего максимального значения. Для приемопередатчиков MAX1483 этот максимум равен примерно 15 мА.
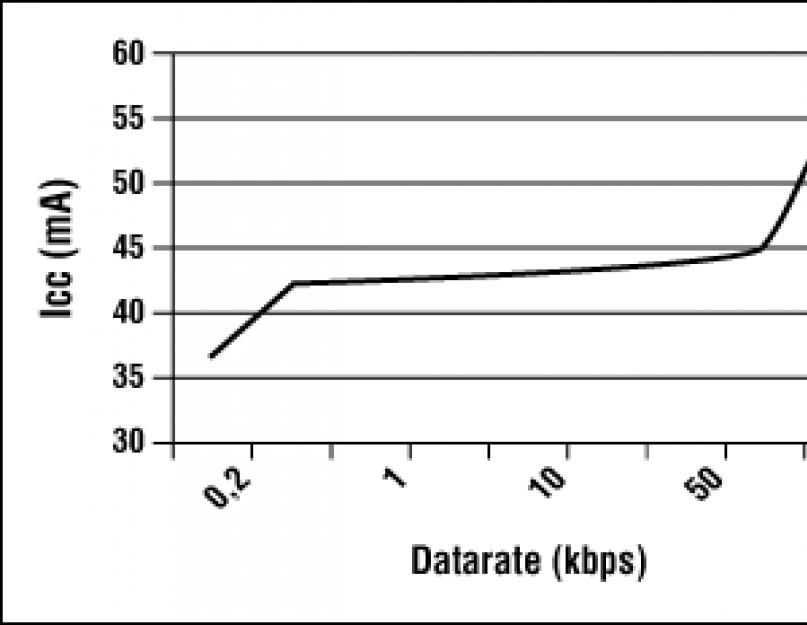
Подключение стандартного приемопередатчика RS-485 к минимальной нагрузке (еще один приемопередатчик, два согласующих и два защитных резистора) позволяет измерить зависимость тока питания от скорости передачи данных в более реальных условиях. На рисунке 2 представлена зависимость ICC от скорости передачи данных для MAX1483 при следующих условиях: стандартные резисторы на 560 Ом, 120 Ом и 560 Ом, VCC = 5В, DE = /RE\ = VCC, и кабель длиной 300 м.
Как вы можете видеть из рисунка 2, ток потребления возрастает приблизительно до 37мА даже при чрезвычайно низких скоростях передачи данных; это вызвано прежде всего добавлением согласующих резисторов и резисторов защитного смещения. Для малопотребляющих приложений, это должно продемонстрировать важность типа используемого согласования, равно как и способа достижения отказоустойчивости. Отказоустойчивость обсуждается в следующем разделе, а подробное описание согласования имеется в разделе "Злые шутки согласования".
Отказоустойчивость
При напряжениях на входах приемников RS-485 в диапазоне от -200мВ до +200мВ, выходное состояние остается неопределенным. Иными словами, если дифференциальное напряжение на стороне RS-485 в полудуплексной конфигурации равно 0В и ни один из приемопередатчиков не ведет линию (или соединение разорвано), тогда логическая единица и логический ноль на выходе равновероятны. Для обеспечения определенного состояния на выходе в таких условиях, большинство современных приемопередатчиков RS-485 требуют установки резисторов защитного смещения: резистор задания начального высокого уровня (pullup) на одну линию (A) и низкого уровня (pulldown) на другую (B), как это показано на рисунке 1. Исторически, резисторы защитного смещения в большинстве схем указывались с номиналом 560 Ом, однако для снижения энергопотерь (когда согласование производится только на одном конце линии связи) это значение можно увеличить приблизительно до 1,1 кОм. Некоторые разработчики устанавливают на обоих концах резисторы с номиналами от 1,1кОм до 2,2кОм. Здесь приходится искать компромисс между помехоустойчивостью и энергопотреблением.
Рисунок 1. Три внешних резистора формируют цепь согласования и защитного смещения для данного приемопередатчика RS-485.

Рисунок 2. Зависимость тока питания приемопередатчика MAX1483 от скорости передачи данных.
Производители приемопередатчиков RS-485 прежде исключали необходимость использования внешних смещающих резисторов, обеспечивая внутренние резисторы положительного смещения по входам приемника, однако такой подход был эффективен только для решения проблемы разомкнутых цепей. Резисторы положительного смещения, используемые в этих псевдоотказоустойчивых приемниках были слишком слабы для установления уровня на выходе приемника в согласованной шине. Другие попытки избежать использования внешних резисторов за счет изменения пороговых значений приемника на 0В и -0,5В нарушали спецификацию RS-485.
Семейство приемопередатчиков MAX3080 и MAX3471 компании Maxim решило обе эти проблемы, определив точный диапазон пороговой чувствительности от -50мВ до -200мВ, устранив, таким образом, потребность в резисторах защитного смещения, сохраняя при этом полное соответствие стандарту RS-485. Эти микросхемы гарантируют, что 0В на входе приемника вызовет высокий логический уровень на выходе. Более того, эта конструкция гарантирует известное состояние выхода приемника для условий замкнутой и разорванной линии.
Как было показано в таблице 2, приемопередатчики сильно различаются значениями их токов покоя. Таким образом первым шагом в деле сохранения энергии должен стать выбор малопотребляющего устройства, такого, как MAX3471 (2,8 мкА при отключенном драйвере, до 64 Кбит/с). Поскольку потребление энергии существенно возрастает при передаче данных, другой целью является минимизация времени работы драйверов за счет передачи коротких телеграмм (блоков данных, прим. пер.) с длительными периодами ожидания между ними. В таблице 3 представлена структура типовой телеграммы последовательной передачи.
Таблица 3. Телеграмма последовательной передачи
Система на основе RS-485, использующая приемники в одну единичную нагрузку (до 32 адресуемых устройств), может, например, иметь следующие биты: 5 битов адреса, 8 битов данных, стартовые биты (все кадры), стоповые биты (все кадры), биты четности (необязательные), и биты CRC (необязательные). Минимальная длина телеграммы для такой конфигурации - 20 битов. Для безопасных передач, вы должны послать дополнительную информацию, такую как размер данных, адрес отправителя и направление, которая увеличит длину телеграммы до 255 байтов (2040 битов).
Подобное изменение длины телеграммы со структурой, определяемой такими стандартами, как X.25, обеспечивает надежность данных за счет увеличения времени использования шины и потребляемой мощности. Например, передача 20 битов при 200 Кбит/с потребует 100 мкс. При использовании MAX1483 для ежесекундной отправки данных на скорости 200 Кбит/с, средний ток составит
(100 мкс * 53 мА + (1 с - 100 мкс) * 20 мкА) / 1 с = 25.3 мкА
Когда приемопередатчик находится в неактивном режиме (idle mode), его драйвер должен быть отключен для минимизации потребляемой мощности. В таблице 4 демонстрируется влияние длины телеграммы на потребляемую мощность одиночного драйвера MAX1483, который работает с определенными перерывами между передачами. Использование режима отключения (shutdown mode) может еще больше снизить потребляемую мощность в системе, использующей технологию опроса через фиксированные промежутки времени или более длинные, детерминированные перерывы между передачами.
Таблица 4. Соотношение между длиной телеграммы и потребляемым током при использовании драйвера MAX1483
В дополнение к этим программным соображениям, аппаратные средства предлагают множество мест для усовершенствования в части энергопотребления. На рисунке 3 сравниваются токи, потребляемые различными трансиверами при передаче сигнала прямоугольной формы по 300-метровому кабелю с активными драйверами и приемниками. 75ALS176 и MAX1483 используют стандартную согласующую цепь 560Ом/120Ом/560Ом на обоих концах линии связи, в то время, как "истино безотказные" ("true failsafe") устройства (MAX3088 и MAX3471) имеют лишь 120-омные согласующие резисторы на обоих концах шины. При 20 Кбит/с токи потребления ранжируются от 12,2мА (MAX3471 с напряжением питания VCC = 3.3V) до 70мА (75ALS176). Таким образом, значительное сокращение потребления возникает немедленно, как только вы выбираете малопотребляющее устройство со свойством "истиной безотказности", которая, кроме того, исключает необходимость установки резисторов защитного смещения (на землю и на линию питания VCC). Убедитесь, что приемник выбранного вами приемопередатчика RS-485, выдает на выход правильные логические уровни для условий как замкнутой, так и разомкнутой цепи.

Рисунок 3. Микросхемы приемопередатчиков сильно отличаются зависимостью тока потребления от скорости передачи данных.
Злые шутки согласования
Как было отмечено выше, согласующие резисторы устраняют отражения, вызваные рассогласованием импедансов, однако их недостаток - дополнительное рассеяние мощности. Их влияние показано в таблице 5, в которой приводятся токи потребления для различных приемопередатчиков (при активном драйвере) для условий отсутствия резисторов, использования только согласующих резисторов, а также комбинации согласующих резисторов и резисторов защитного смещения.
Таблица 5. Использование согласующих резисторов и резисторов защитного смещения увеличивает потребляемый ток
| MAX1483 | MAX3088 | MAX3471 | SN75ALS176 | |
| I VCC (no RT) | 60 мкА | 517 мкА | 74 мкА | 22 мкА |
| I VCC (RT =120) | 24 мкА | 22.5 мкА | 19.5 мкА | 48 мкА |
| I VCC (RT = 560-120-560) | 42 мкА | N/A | N/A | 70 мкА |
Исключение согласования
Первый способ уменьшения потребляемой мощности состоит в том, чтобы вообще устранить согласующие резисторы. Этот вариант возможен только для коротких линий связи и низких скоростей передачи данных, которые позволяют отражениям успокоиться еще до того, как данные будут обработаны приемником. Как показывает практика, согласование не нужно, если время нарастания сигнала по крайней мере в четыре раза превосходит время задержки одностороннего прохождения сигнала через кабель. Следующие шаги используют это правило для вычисления максимальной допустимой длины несогласованного кабеля:
- Шаг 1. Для рассматриваемого кабеля найдите скорость одностороннего прохождения сигнала, обычно предоставляемую производителем кабеля как процентное отношение к скорости света в свободном пространстве (c = 3x10 8 м/с). Типовое значение для стандартного кабеля в поливинилхлоридной изоляции (состоящего их витой пары #24 AWG) составляет 203мм/нс.
- Шаг 2 . Из спецификации приемопередатчика RS-485 найдите его минимальное время нарастания (t r min). Например, для MAX3471 оно равно 750нс.
- Шаг 3 . Разделите это минимальное время нарастания на 4. Для MAX3471 получим t r min /4 = 750нс/4 = 187.5нс.
- Шаг 4 . Вычислите максимальную протяженность кабеля, для которой не требуется согласование: 187.5нс (230мм/нс) = 38м.
Таким образом, MAX3471 может обеспечить приличное качество сигнала при передаче и приеме на скорости 64Кбит/с по 38-метровому кабелю без согласующих резисторов. Рисунок 4 демонстрирует достигнутое драматическое снижение потребления MAX3471, когда 30 метров кабеля без согласующего резистора используются вместо 300 метров кабеля и 120 согласующих резисторов.

Рисунок 4. Согласующие резисторы - основной потребитель мощности.
RC-согласование
На первый взгляд, способность RC согласования блокировать постоянный ток является весьма многообещающей. Вы найдете, однако, что эта техника налагает определенные условия. Согласование состоит из последовательной RC цепочки, включенной параллельно дифференциальным входам приемника (A и B), как показано на рисунке 5. Несмотря на то, что R всегда равно волновому сопротивлению кабеля (Z 0), выбор C требует некоторых рассуждений. Большая величина C обеспечивает хорошее согласование, позволяя любому сигналу видеть R, которое соответствует Z0, однако большие значения также увеличивают пиковое значение выходного тока драйвера. К сожалению, более длинные кабели требуют больших значений емкости C. Целые статьи были посвящены определению номинала C для достижения этого компромисса. Вы можете найти детальные уравнения на эту тему в руководствах, ссылки на которые приведены в конце настоящей статьи.

Рисунок 5. RC согласование снижает потребление, однако требует тщательного выбора номинала C.
Среднее напряжение сигнала - другой важный фактор, который часто игнорируется. Если только среднее напряжение сигнала не сбалансировано по постоянному току, эффект зубчатого контура (stair-stepping effect) по постоянному току вызывает значительные дрожания из-за эффекта, известного как "межсимвольная интерференция." Если коротко, то RC согласование эффективно для снижения потребления, однако оно склонно к разрушению качества сигнала. Поскольку RC согласование налагает так много ограничений на свое использование, лучшая альтернатива во многих случаях - отсутствие согласования вообще.
Согласование на диодах Шотки
Диоды Шотки предлагают альтернативный метод согласования, когда большая потребляемая мощность вызывает беспокойство. В отличие от других типов согласования, диоды Шотки не пытаются соответствовать волновому сопротивлению шины. Вместо этого, они просто подавляют положительные и отрицательные выбросы на фронтах импульсов, вызванные отражением. В результате, изменения напряжения ограничены положительным пороговым напряжением и нулем.
Цепь согласования на диодах Шотки впустую рассеивает незначительную энергию, поскольку они проводят только при наличии положительных и отрицательных выбросов. С другой стороны, стандартное резистивное согласование (как с резисторами защитного смещения, так и без оных), постоянно рассеивает мощность. Рисунок 6 иллюстрирует использование диодов Шотки для борьбы с отражениями. Диоды Шотки не обеспечивают отказоустойчивую работу, однако уровни порогового напряжения, выбранные в приемопередатчиках MAX308X и MAX3471, дают возможность реализовать отказоустойчивую работу с этим типом согласования.

Рисунок 6. Несмотря на дороговизну, цепь согласования на диодах Шотки имеет много достоинств.
Диод Шотки, наилучшее доступное приближение к идеальному диоду (нулевое прямое напряжение Vf, нулевое время включения tON и нулевое время обратного восстановления trr), представляет большой интерес в качестве замены энергоемких согласующих резисторов. Недостаток такого согласования в системах на основе RS-485/RS-422 заключается в том, что диоды Шотки не могут подавлять все отражения. Как только отраженный сигнал угаснет ниже прямого напряжения диода Шотки, его энергия останется незатронутой согласующими диодами и сохранится до тех пор, пока не будет рассеяна кабелем. Существенно или нет это затяжное возмущение, зависит от величины сигнала на входах приемника.
Главный недостаток Шотки-терминатора - его стоимость. Одна точка согласования требует двух диодов. Поскольку шина RS-485/RS-422 является дифференциальной, это число снова умножается на два (Рисунок 6). Использование на шине многжественных Шотки-терминаторов не является необычным.
Терминаторы на диодах Шотки дают много преимуществ для систем на основе RS-485/RS-422, и экономия энергии - главное из них (Рисунок 7). Не нужно ничего вычислять, поскольку специфицированные ограничения для длины кабеля и скорости передачи данных будут достигнуты раньше, чем какие либо ограничения Шотки-терминатора. Другое преимущество заключается в том, что множественные Шотки-терминаторы в различных ответвлениях и на входах приемников улучшают качество сигнала без загрузки коммуникационной шины.

Рисунок 7. Потребляемый ток в системах RS-485 сильно зависит от скорости передачи данных и типа согласования.
Подведение итогов
Когда скорость передачи данных высока и кабель имеет большую длину, в системе RS-485 трудно обеспечить сверхмалое потребление (в оригинале "flea power" - "мощность блохи", - Прим. пер.), поскольку возникает необходимость устанавливать на линии связи согласующие устройства (терминаторы). В этом случае приемопередатчики с функцией "истиной помехоустойчивости" на выходах приемников могут экономить энергию даже при использовании терминаторов, устраняя потребность в резисторах защитного смещения. Программная организация связи также позволяет снизить потребляемую мощность, переводя приемопередатчик в отключенное состояние или запрещая драйвер, когда он не используется.
Для более низких скоростей и более коротких кабелей разница в энергопотреблении огромна: Передача данных со скоростью 60 Кбит/с по 30-метровому кабелю при использовании стандартного приемопередатчика SN75ALS176 со 120-омными согласующими резисторами потребует от системы электропитания ток 70мА. С другой стороны, использование MAX3471 при тех же самых условиях потребует только 2,5мА от источника питания.
ИНТЕРФЕЙС RS-485: ОПИСАНИЕ И ПОДКЛЮЧЕНИЕ
ООО НовоСофт
RS-485 - это номер стандарта, впервые принятого Ассоциацией электронной промышленности (EIA). Cейчас этот стандарт назывется TIA/EIA-485 Electrical Characteristics of Generators and Receivers for Use in Balanced Digital Multipoint Systems (Электрические характеристики передатчиков и приемников, используемых в балансных цифровых многоточечных системах).
В народе RS-485
- это название популярного интерфейса, используемого в промышленных АСУТП для соединения контроллеров и другого оборудования. Главное отличие RS-485 от также широко распространенного RS-232 - возможность объединения нескольких устройств.
Описание интерфейса RS-485
Интерфейс RS-485 обеспечивает обмен данными между несколькими устройствами по одной двухпроводной линии связи в полудуплексном режиме. Широко используется в промышленности при создании АСУ ТП.
Скорость и дальность
RS-485 обеспечивает передачу данных со скоростью до 10 Мбит/с. Максимальная дальность зависит от скорости: при скорости 10 Мбит/с максимальная длина линии - 120 м, при скорости 100 кбит/с - 1200 м.
Количество соединяемых устройств
Количество устройств, подключаемых к одной линии интерфейса, зависит от типа примененных в устройстве приемопередатчиков. Один передатчик рассчитан на управление 32 стандартными приемниками. Выпускаются приемники со входным сопротивлением 1/2, 1/4, 1/8 от стандартного. При использовании таких приемников общее число устройств может быть увеличено соответственно: 64, 128 или 256.
Протоколы и разъемы
Стандарт не нормирует формат информационных кадров и протокол обмена. Наиболее часто для передачи байтов данных используются те же фреймы, что и в интерфейсе RS-232 : стартовый бит, биты данных, бит паритета (если нужно), стоповый бит.
Протоколы обмена в большинстве систем работают по принципу «ведущий»-«ведомый». Одно устройство на магистрали является ведущим (master) и инициирует обмен посылкой запросов подчиненным устройствам (slave), которые различаются логическими адресами. Одним из популярных протоколов является протокол Modbus RTU.
Тип соединителей и распайка также не оговариваются стандартом. Встречаются соединители DB9, клеммные соединители и т.д.
Подключение
Схема подключения
На рисунке изображена локальная сеть на основе интерфейса RS-485, объединяющая несколько приемо-передатчиков.
При подключении следует правильно присоединить сигнальные цепи, обычно называемые А и В. Переполюсовка не страшна, но устройство работать не будет.
- Лучшей средой передачи сигнала является кабель на основе витой пары .
- Концы кабеля должны быть заглушены терминальными резисторами (обычно 120 Ом).
- Сеть должна быть проложена по топологии шины, без ответвлений .
- Устройства следует подключать к кабелю проводами минимальной длины .
Согласование
Терминальные резисторы обеспечивают согласование «открытого» конца кабеля с остальной линией, устраняя отражение сигнала.
Номинальное сопротивление резисторов соответствует волновому сопротивлению кабеля, и для кабелей на основе витой пары обычно составляет 100 — 120 Ом. Например, широко распространённый кабель UTP-5, используемый для прокладки Ethernet, имеет импеданс 100 Ом. Специальные кабели для RS-485 марки Belden 9841 … 9844 - 120 Ом. Для другого типа кабеля может потребоваться другой номинал.
Резисторы могут быть запаяны на контакты кабельных разъемов у конечных устройств. Иногда резисторы бывают смонтированы в самом устройстве и для подключения резистора нужно установить перемычку. В этом случае при отсоединении устройства линия рассогласовывается, и для нормальной работы остальной системы требуется подключение согласующей заглушки.
Уровни сигналов
Интерфейс RS-485 использует балансную (дифференциальную) схему передачи сигнала. Это означает, что уровни напряжений на сигнальных цепях А и В меняются в противофазе, как показано на приведенном ниже рисунке:
Передатчик должен обеспечивать уровень сигнала 1,5 В при максимальной нагрузке (32 стандартных входа и 2 терминальных резистора) и не более 6 В на холостом ходу. Уровни наряжений измеряют дифференциально, один сигнальный провод относительно другого.
На стороне приемника RS-485 минимальный уровень принимаемого сигнала должен быть не менее 200 мВ.
Осциллограмма реального обмена
Ниже приведена осциллограмма реального обмена (запрос и начало ответа) при обмене двух контроллеров ВАРИКОНТ по интерфейсу RS-485 (цепь A относительно цепи B). На осциллограмме цифрами отмечены некоторые ключевые моменты:
- Включение передатчика ведущего контроллера. После включения выдержана пауза.
- Начало передачи данных - стартовый бит первого фрейма (фреймы аналогичны фреймам RS-232: стартовый бит, биты данных, бит паритета, стоповый бит).
- Завершение передачи данных - стоповый бит последнего фрейма.
- Выключение передатчика.
- Включение передатчика ведомого контроллера.
Cмещение
Как видно на осциллограмме выше, в отсутствие сигнала на сигнальных цепях имеется небольшое смещение. Это смещение предназначено для защиты приемников от ложных срабатываний.
Рекомендуется создавать смещение немногим более 200 мВ (зона недостоверности входного сигнала согласно стандарту). При этом цепь A «подтягивают» к положительному полюсу источника, а цепь B - к «общему». Один из вариантов реализации цепи смещения показан ниже:
Номиналы резисторов рассчитывают, исходя из требуемого смещения и напряжения источника питания. Например, мы хотим получить смещение 250 мВ при терминальных резисторах Rт = 120 Ом и напряжении источника 12 В. Учитывая, что 2 терминальных резистора включены параллельно и не принимая во внимание нагрузку от приемников, получаем ток смещения I = U / R = 0,250 В / 60 Ом = 0,0042 А. Общее сопротивление цепи смещения R = U / I = 12 В / 0,0042 А = 2857 Ом. Получаем Rсм = (2857 — 60) / 2 ~= 1400 Ом. Выбираем ближайший номинал - 1,3 или 1,5 кОм.
Мы, например, используем для смещения резисторы 1,5 кОм и внешний 12-вольтовый, гальванически развязанный выход блока питания контроллера ВАРИКОНТ, который является ведущим в своём сегменте сети.
Возможны другие варианты реализации смещения, например, распределённая схема с резисторами большого номинала на каждом узле. При размещении цепей смещения следует принимать во внимание, что узел, обеспечивающий смещение, может быть выключен или вовсе удалён из сети.
При использовании приёмо-передатчиков с гальванической развязкой (типа MAX1480) следует использовать и гальванически развязанный источник питания, иначе пользы от дорогих приёмо-передатчиков не будет никакой.
При наличии смещения потенциал цепи А на холостом ходу положителен относительно цепи B, что может служить ориентиром при подключении нового устройства к кабелю с немаркированными проводами.
Искажения из-за неправильной разводки сети
Выполнение перечисленных выше рекомендаций гарантирует нормальную передачу электрических сигналов в любую точку сети на основе интерфейса RS-485. При несоблюдении хотя бы одного из требований сигнал искажается. Вот, например, осциллограммы сигнала, снятого в точке подключения приемника, расположенного в 15 метрах от передатчика и 30 метрах от конца линии, при включенном и отключенном согласующем резисторе:
Следующая осциллограмма показывает искажения сигнала, возникающие при подключении к основному согласованному кабелю длинным 3-метровым отводом:
Приведенные осциллограммы характерны для высоких скоростей обмена (1 Мбит/с и выше). Однако и на более низких скоростях не следует пренебрегать приведенными рекомендациями, даже если «оно и так работает».
При программировании приложений для контроллеров, использующих для связи интерфейс RS-485, следует учитывать несколько моментов:
- Перед началом выдачи посылки нужно включить передатчик. Хотя некоторые источники утверждают, что выдачу можно начинать сразу после включения, мы рекомендуем выдержать паузу, равную или большую длительности передачи одного фрейма (включая стартовый и стоповый биты). В этом случае правильная программа приема успевает обнаружить ошибки переходного процесса, нормализоваться и подготовиться к приему первого байта данных.
- После выдачи последнего байта данных следует также выдержать паузу перед выключением передатчика RS-485. Это связано с тем, что контроллер последовательного порта обычно имеет два регистра: параллельный входной для приема данных и выходной сдвиговый для последовательного вывода. Прерывание по передаче контроллер формирует при опустошении входного регистра, когда данные уже выложены в сдвиговый регистр, но ещё не выданы! Поэтому с момента прерывания до выключения передатчика нужно выдержать паузу. Ориентировочная длительность паузы - на 0,5 бита длиннее фрейма, для точного расчета следует внимательно изучить документацию на контроллер последовательного порта. , . Вы можете следить за ответами к этой записи через . Вы можете или со своего сайта.
В современной технике все большее значение приобретает обмен информацией между различными устройствами. А для этого требуется передавать данные как на небольшие расстояния, так и на значительные, порядка километров. Один из таких видов передачи данных – связь между устройствами по интерфейсу RS-485.
Где необходимо передавать данные по RS 485.
Один из самых распространенных примеров применения устройств для обмена данными – . Электросчетчики, объединяемые в единую сеть, рассредоточены по шкафам, ячейкам распределительных устройств и даже подстанциях, находящимся на значительном удалении друг от друга. В этом случае интерфейс служит для отправки данных от одного или нескольких устройств учета.
Система «один счетчик – один модем» активно внедряется для передачи данных в службы энергосбытовых компаний от узлов учета частных домов, небольших предприятий.
Другой пример: получение данных от микропроцессорных терминалов релейной защиты в режиме реального времени, а также централизованный доступ к ним с целью внесения изменений. Для чего терминалы обвязываются через интерфейс связи аналогичным образом, а данные от него поступают в компьютер, установленный у диспетчера. В случае срабатывания защиты оперативный персонал имеет возможность сразу же получить информацию о месте действия и характере повреждения силовых цепей.
Но самой сложной задачей, решаемой интерфейсами связи, являются системы централизованного управления сложными производственными процессами – АСУ ТП. У оператора промышленной установки на столе есть компьютер, на дисплее которого он видит текущее состояние процесса: температуры, производительность, включенные и отключенные агрегаты, их режим работы. И имеет возможность всем этим управлять легким щелчком мыши.
Компьютер же обменивается данными с контроллерами – устройствами, преобразующими команды от датчиков на язык, понятный машине, и обратное преобразование: от языка машины в команды управления. Связь с контроллером, а также – между разными контроллерами, осуществляется через интерфейсы связи.
 Интерфейс RS-232 — младший брат RS 485.
Интерфейс RS-232 — младший брат RS 485.
Нельзя хотя бы коротко не упомянуть об интерфейсе RS-232, который еще называют последовательным. Разъем под соответствующий порт имеют некоторые ноутбуки, а некоторые цифровые устройства (те же терминалы релейной защиты) снабжаются выходами для связи с помощью RS-232.
Для того, чтобы обмениваться информацией, нужно уметь ее передавать и принимать. У для этого есть передатчик и приемник сигналов. Они имеются в каждом устройстве. Причем выход передатчика одного устройства (TX) соединяется со входом приемника другого устройства (RX). И, соответственно, по другому проводнику аналогичным образом сигнал движется в обратную сторону.
При этом обеспечивается полудуплексный режим связи, то есть, приемник и передатчик могут работать одновременно. Данные по кабелю RS-232 могут в одно и то же время перемещаться и в одну, и в другую сторону.
Недостаток этого интерфейса – низкая помехозащищенность. Это происходит из-за того, что сигнал в соединительный кабель и на прием, и на передачу формируется относительно общего провода – земли. Любая наводка, существующая даже в экранированном кабеле, может привести к сбою связи, потере отдельных битов информации. А это недопустимо при управлении сложными и недешевыми механизмами, где любая ошибка – авария, а потеря связи – длительный простой.
Поэтому в основном применяется для небольших временных подключений ноутбука к цифровому устройству, например, для установки начальной конфигурации или исправления ошибок.
 Организация интерфейса RS-485.
Организация интерфейса RS-485.
Главное отличие RS-458 от RS-232 – все приемники и передатчики работают на одну пару проводов, являющуюся линией связи. Провод земли при этом не используется, а сигнал в линии формируется дифференциальным методом. Он передается одновременно по двум проводам («А» и «В») в инверсном виде.
Если на выходе передатчика – логический «0», то на проводник «А» выдается нулевой потенциал. На проводнике «В» формируется сигнал «не 0», то есть – «1». Если передатчик транслирует «1», получается все наоборот.
В итоге получаем изменение напряжения сигнала между двумя проводами, представляющими собой витую пару. Любая наводка, попадая в кабель, изменяет напряжение относительно земли одинаково на обоих проводах пары. Но напряжение полезного сигнала формируется между проводами, а поэтому – ничуть не страдает от потенциалов на них.
Порядок обмена данными между устройствами по RS-485.
Все устройства, объединяемые интерфейсом RS-485, имеют всего два клеммы: «А» и «В». Для подключения к общей сети эти клеммы соединяются в параллельную цепь. Для этого от одного устройства к другому прокладывается цепочка кабелей.
При этом возникает необходимость упорядочить обмен данными между устройствами, установив очередность передачи и приема, а также – формат пересылаемых данных. Для этого служит специальная инструкция, называемая протоколом.
Протоколов обмена данными по интерфейсу RS-485 существует много, наиболее часто используемый – Modbas. Вкратце рассмотрим, как работает простейший протокол, и какие еще проблемы приходится решать с его помощью.
Для примера разберем сеть, в которой одно устройство собирает данные с нескольких источников данных. Это может быть модем и группа электросчетчиков. Для того, чтобы знать, от какого счетчика пойдут данные, каждому приемопередатчику присваивается номер, уникальный для данной сети. Номер присваивается и приемопередатчику модема.
Когда приходит пора собирать данные о расходе электроэнергии, модем формирует запрос. Сначала передается стартовый импульс, по которому все устройства понимают, что сейчас придет кодовое слово – посылка из последовательности нулей и единиц. В ней первые биты будут соответствовать номеру абонента в сети, остальное – данные, например, команда передать требуемую информацию.
Все устройства принимают посылку и сравнивают номер вызываемого абонента со своим собственным. Если они совпадают – выполняется команда, переданная в составе запроса. Если нет – устройство игнорирует его текст и не делает ничего.
При этом во многих протоколах посылается назад подтверждение, что команда принята к исполнению или выполнена. Если ответа нет, передающее устройство может повторить запрос определенное количество раз. Если реакции так и не последует, генерируются сведения об ошибке, связанные с неисправностью канала связи с молчащим абонентом.
Ответа может не последовать не только при поломке. При наличии сильных помех в канале связи, которые все-таки проникают туда, команды могут не доходить до пункта назначения. Еще они подвергаются искажениям и не правильно при этом распознаются.
Неверного выполнения команды допустить нельзя, поэтому в данные посылки вводят заведомо избыточную информацию – контрольную сумму. Она подсчитывается по определенному закону, прописанному в протоколе, на передающей стороне. На приемной подсчитывается контрольная сумма по такому же принципу и сравнивается с переданной. Если они совпадают, прием считается успешным, и команда выполняется. Если нет – устройство пересылает на передающую сторону сообщение об ошибке.
Требования к кабельным соединениям.
Для соединения устройств интерфейсом RS-485 используются кабели «витая пара». Хоть для передачи данный достаточно одной пары проводов, обычно применяются кабели минимум с двумя, чтобы был заложен резерв.
Для лучшей защиты от помех кабели экранируются, при этом экраны на всей линии соединяют друг с другом. Для этого на объединяемых устройствах помимо выводов «А» и «В» имеется клемма «СОМ». Заземляется линия только в одной точке, обычно в месте расположения контроллера, модема или компьютера. В двух точках это делать запрещено, чтобы избежать наводок, которые неизбежно пойдут по экрану из-за разности потенциалов в точках заземления.
Кабели соединяют только последовательно друг с другом, делать ответвления нельзя. Для согласования линии в ее конце подключается резистор с сопротивлением 120 Ом (это волновое сопротивление кабеля).
В целом монтаж кабельных линий интерфейса – простое занятие. Гораздо сложнее будет настроить аппаратуру, для чего понадобятся люди со специальными знаниями.
Для лучшего понимая работы интерфейса RS-485 предлагаем Вам посмотреть следующее видео:
- 2. Интерфейс RS-485
- 4. Защитное смещение
- 6. «Горячее» подключение к линии связи
- 7. Рекомендации по организации протокола связи
- Заключение
Вступление
Как следует из названия, статья эта - попытка объяснить начинающим что к чему и помочь обойти грабли, на которые уже кто-то наступал. Если кто-нибудь, потратив 15 минут на прочтение, сэкономит пару дней на отладке системы, я буду считать свою задачу выполненной.
Столкнувшись с необходимостью организовать связь между несколькими устройствами на базе микроконтроллеров, я стал собирать информацию по этой теме. Из конструктивных соображений определился с методом связи - последовательный канал и линия связи на основе интерфейса RS-485. Затем последовал отсев излишних теоретических рассуждений и отбор практических рекомендаций по наладке линии связи. Особое внимание я уделял описанию различных "подводных камней". На бумаге, как известно, всегда все работает, а вот на практике вскрываются неприятные особенности, притом нигде не описанные. Так и оказалось - сделали все по инструкции, а потом не одну неделю отлавливали глюки.
В этой статье я попытался собрать начальную информацию об устройствах, полезные добытые сведения (с ссылками) и собственный опыт.
1. Универсальный асинхронный приемопередатчик (UART)
Возможно, связь через асинхронный последовательный порт уходит в прошлое, однако сложно найти контроллер, не имеющего в составе своей периферии UART. Поэтому хоронить его, думаю, рановато. Раз так, то будет нелишним сказать пару слов о том, как оно работает. Описание конкретной реализации последовательного порта есть в datasheet на каждый контроллер, поэтому опишу общее для всех.
UART можно разделить на приемник (Receiver) и передатчик (Transmitter). В состав UART входят: тактовый генератор связи (бодрейт-генератор), управляющие регистры, статусные регистры, буферы и сдвиговые регистры приемника и передатчика. Бодрейт-генератор задает тактовую частоту приемопередатчика для данной скорости связи. Управляющие регистры задают режим работы последовательного порта и его прерываний. В статусном регистре устанавливаются флаги по различным событиям. В буфер приемника попадает принятый символ, в буфер передатчика помещают передаваемый. Сдвиговый регистр передатчика - это обойма, из которой в последовательный порт выстреливаются биты передаваемого символа (кадра). Сдвиговый регистр приемника по биту накапливает принимаемые из порта биты. По различным событиям устанавливаются флаги и генерируются прерывания (завершение приема/отправки кадра, освобождение буфера, различные ошибки).
UART - полнодуплексный интерфейс, то есть приемник и передатчик могут работать одновременно, независимо друг от друга. За каждым из них закреплен порт - одна ножка контроллера. Порт приемника обозначают RX, передатчика - TX. Последовательной установкой уровней на этих портах относительно общего провода ("земли") и передается информация. По умолчанию передатчик устанавливает на линии единичный уровень. Передача начинается посылкой бита с нулевым уровнем (старт-бита), затем идут биты данных младшим битом вперед (низкий уровень - "0", высокий уровень - "1"), завершается посылка передачей одного или двух битов с единичным уровнем (стоп-битов).
Электрический сигнал кадра посылки выглядит так:
Перед началом связи между двумя устройствами необходимо настроить их приемопередатчики на одинаковую скорость связи и формат кадра.
Скорость связи или бодрейт (baudrate) измеряется в бодах - число передаваемых бит в секунду (включая старт и стоп-биты). Задается эта скорость в бодрейт-генераторе делением системной частоты на задаваемый коэффициент. Типичный диапазон скоростей: 2400 … 115200 бод.
Формат кадра определяет число стоп-битов (1 или 2), число бит данных (8 или 9), а также назначение девятого бита данных. Все это зависит от типа контроллера.
Приемник и передатчик тактируются, как правило, с 16-кратной частотой относительно бодрейта. Это нужно для смплирования сигнала. Приемник, поймав падающий фронт старт-бита, отсчитывает несколько тактов и следующие три такта считывает (семплирует) порт RX. Это как раз середина старт-бита. Если большинство значений семплов - "0", старт-бит считается состоявшимся, иначе приемник принимает его за шум и ждет следующего падающего фронта. После удачного определения старт-бита, приемник точно также семплирует серединки битов данных и по большинству семплов считает бит "0" или "1", записывая их в сдвиговый регистр. Стоп-биты тоже семплируются, и если уровень стоп-бита не "1" - UART определяет ошибку кадра и устанавливает соответствующий флаг в управляющем регистре.

Поскольку бодрейт устанавливается делением системной частоты, при переносе программы на устройство с другим кварцевым резонатором, необходимо изменить соответствующие настройки UART.
2. Интерфейс RS-485
Интерфейс RS-485 (другое название - EIA/TIA-485) - один из наиболее распространенных стандартов физического уровня связи. Физический уровень - это канал связи и способ передачи сигнала (1 уровень модели взаимосвязи открытых систем OSI).
Сеть, построенная на интерфейсе RS-485, представляет собой приемопередатчики, соединенные при помощи витой пары - двух скрученных проводов. В основе интерфейса RS-485 лежит принцип дифференциальной (балансной) передачи данных. Суть его заключается в передаче одного сигнала по двум проводам. Причем по одному проводу (условно A) идет оригинальный сигнал, а по другому (условно B) - его инверсная копия. Другими словами, если на одном проводе "1", то на другом "0" и наоборот. Таким образом, между двумя проводами витой пары всегда есть разность потенциалов: при "1" она положительна, при "0" - отрицательна.

Именно этой разностью потенциалов и передается сигнал. Такой способ передачи обеспечивает высокую устойчивость к синфазной помехе. Синфазной называют помеху, действующую на оба провода линии одинаково. К примеру, электромагнитная волна, проходя через участок линии связи, наводит в обоих проводах потенциал. Если сигнал передается потенциалом в одном проводе относительно общего, как в RS-232, то наводка на этот провод может исказить сигнал относительно хорошо поглощающего наводки общего ("земли"). Кроме того, на сопротивлении длинного общего провода будет падать разность потенциалов земель - дополнительный источник искажений. А при дифференциальной передаче искажения не происходит. В самом деле, если два провода пролегают близко друг к другу, да еще перевиты, то наводка на оба провода одинакова. Потенциал в обоих одинаково нагруженных проводах изменяется одинаково, при этом информативная разность потенциалов остается без изменений.
Аппаратная реализация интерфейса - микросхемы приемопередатчиков с дифференциальными входами/выходами (к линии) и цифровыми портами (к портам UART контроллера). Существуют два варианта такого интерфейса: RS-422 и RS-485.
RS-422 - полнодуплексный интерфейс. Прием и передача идут по двум отдельным парам проводов. На каждой паре проводов может быть только по одному передатчику.
RS-485 - полудуплексный интерфейс. Прием и передача идут по одной паре проводов с разделением по времени. В сети может быть много передатчиков, так как они могут отключаются в режиме приема.

- D (driver) - передатчик;
- R (receiver) - приемник;
- DI (driver input) - цифровой вход передатчика;
- RO (receiver output) - цифровой выход приемника;
- DE (driver enable) - разрешение работы передатчика;
- RE (receiver enable) - разрешение работы приемника;
- A - прямой дифференциальный вход/выход;
- B - инверсный дифференциальный вход/выход;
- Y - прямой дифференциальный выход (RS-422);
- Z - инверсный дифференциальный выход (RS-422).
Остановлюсь поподробнее на приемопередатчике RS-485. Цифровой выход приемника (RO) подключается к порту приемника UART (RX). Цифровой вход передатчика (DI) к порту передатчика UART (TX). Поскольку на дифференциальной стороне приемник и передатчик соединены, то во время приема нужно отключать передатчик, а во время передачи - приемник. Для этого служат управляющие входы - разрешение приемника (RE) и разрешения передатчика (DE). Так как вход RE инверсный, то его можно соединить с DE и переключать приемник и передатчик одним сигналом с любого порта контроллера. При уровне "0" - работа на прием, при "1" - на передачу.

Приемник, получая на дифференциальных входах (AB) разность потенциалов (UAB) переводит их в цифровой сигнал на выходе RO. Чувствительность приемника может быть разной, но гарантированный пороговый диапазон распознавания сигнала производители микросхем приемопередатчиков пишут в документации. Обычно эти пороги составляют ± 200 мВ. То есть, когда UAB > +200 мВ - приемник определяет "1", когда UAB < -200 мВ - приемник определяет "0". Если разность потенциалов в линии настолько мала, что не выходит за пороговые значения - правильное распознавание сигнала не гарантируется. Кроме того, в линии могут быть и не синфазные помехи, которые исказят столь слабый сигнал.
Все устройства подключаются к одной витой паре одинаково: прямые выходы (A) к одному проводу, инверсные (B) - к другому.
Входное сопротивление приемника со стороны линии (RAB) обычно составляет 12 КОм. Так как мощность передатчика не беспредельна, это создает ограничение на количество приемников, подключенных к линии. Согласно спецификации RS-485 c учетом согласующих резисторов передатчик может вести до 32 приемников. Однако есть ряд микросхем с повышенным входным сопротивлением, что позволяет подключить к линии значительно больше 32 устройств.
Максимальная скорость связи по спецификации RS-485 может достигать 10 Мбит/сек. Максимальное расстояние - 1200 м. Если необходимо организовать связь на расстоянии большем 1200 м или подключить больше устройств, чем допускает нагрузочная способность передатчика - применяют специальные повторители (репитеры).Стандартные параметры интерфейсов RS-422 RS-485:
| Стандартные параметры интерфейсов | RS-422 | RS-485 |
|---|---|---|
|
Допустимое число передатчиков / приемников |
1 / 10 | 32 / 32 |
|
Максимальная длина кабеля |
1200 м | 1200 м |
|
Максимальная скорость связи |
10 Мбит/с | 10 Мбит/с |
|
Диапазон напряжений "1" передатчика |
+2...+10 В | +1.5...+6 В |
|
Диапазон напряжений "0" передатчика |
-2...-10 В | -1.5...-6 В |
|
Диапазон синфазного напряжения передатчика |
-3...+3 В | -1...+3 В |
|
Допустимый диапазон напряжений приемника |
-7...+7 В | -7...+12 В |
|
Пороговый диапазон чувствительности приемника |
±200 мВ | ±200 мВ |
|
Максимальный ток короткого замыкания драйвера |
150 мА | 250 мА |
|
Допустимое сопротивление нагрузки передатчика |
100 Ом | 54 Ом |
|
Входное сопротивление приемника |
4 кОм | 12 кОм |
|
Максимальное время нарастания сигнала передатчика |
10% бита | 30% бита |
3. Согласование и конфигурация линии связи
При больших расстояниях между устройствами, связанными по витой паре и высоких скоростях передачи начинают проявляться так называемые эффекты длинных линий. Причина этому - конечность скорости распространения электромагнитных волн в проводниках. Скорость эта существенно меньше скорости света в вакууме и составляет немногим больше 200 мм/нс. Электрический сигнал имеет также свойство отражаться от открытых концов линии передачи и ее ответвлений. Грубая аналогия - желоб, наполненный водой. Волна, созданная в одном конце, идет по желобу и, отразившись от стенки в конце, идет обратно, отражается опять и так далее, пока не затухнет. Для коротких линий и малых скоростей передачи этот процесс происходит так быстро, что остается незамеченным. Однако, время реакции приемников - десятки/сотни нс. В таком масштабе времени несколько десятков метров электрический сигнал проходит отнюдь не мгновенно. И если расстояние достаточно большое, фронт сигнала, отразившийся в конце линии и вернувшийся обратно, может исказить текущий или следующий сигнал. В таких случаях нужно каким-то образом подавлять эффект отражения.
Наука Электротехника предлагает решение этой проблемы. У любой линии связи есть такой параметр, как волновое сопротивление Zв. Оно зависит от характеристик используемого кабеля, но не от длины. Для обычно применяемых в линиях связи витых пар Zв=120 Ом. Оказывается, что если на удаленном конце линии, между проводниками витой пары включить резистор с номиналом равным волновому сопротивлению линии, то электромагнитная волна дошедшая до "тупика" поглощается на таком резисторе. Отсюда его названия - согласующий резистор или "терминатор".
Большой минус согласования на резисторах - повышенное потребление тока от передатчика, ведь в линию включается низкоомная нагрузка. Поэтому рекомендуется включать передатчик только на время отправки посылки. Есть способы уменьшить потребление тока, включая последовательно с согласующим резистором конденсатор для развязки по постоянному току. Однако, такой способ имеет свои недостатки. Для коротких линий (несколько десятков метров) и низких скоростей (меньше 38400 бод) согласование можно вообще не делать. Подробнее можно почитать в статье "Обрежьте жирок с RS-485".
Эффект отражения и необходимость правильного согласования накладывают ограничения на конфигурацию линии связи.
Линия связи должна представлять собой один кабель витой пары. К этому кабелю присоединяются все приемники и передатчики. Расстояние от линии до микросхем интерфейса RS-485 должно быть как можно короче, так как длинные ответвления вносят рассогласование и вызывают отражения.
В оба наиболее удаленных конца кабеля (Zв=120 Ом) включают согласующие резисторы Rt по 120 Ом (0.25 Вт). Если в системе только один передатчик и он находится в конце линии, то достаточно одного согласующего резистора на противоположном конце линии.

4. Защитное смещение
Как уже упоминалось, приемники большинства микросхем RS-485 имеют пороговый диапазон распознавания сигнала на входах A-B - ±200мВ. Если |Uab| меньше порогового (около 0), то на выходе приемника RO могут быть произвольные логические уровни из-за несинфазной помехи. Такое может случиться либо при отсоединении приемника от линии, либо при отсутствии в линии активных передатчиков, когда никто не задает уровень. Чтобы в этих ситуациях избежать выдачи ошибочных сигналов на приемник UART, необходимо на входах A-B гарантировать разность потенциалов Uab > +200мВ. Это смещение при отсутствии входных сигналов обеспечивает на выходе приемника логическую "1", поддерживая, таким образом, уровень стопового бита.
Добиться этого просто - прямой вход (А) следует подтянуть к питанию, а инверсный (B) - к "земле". Получается делитель:

Rвх - входное сопротивление приемника (обычно 12 кОм);
Rc - согласующие резисторы (120 Ом);
Rзс - резисторы защитного смещения.
Величины сопротивлений для резисторов защитного смещения (Rзс) нетрудно рассчитать по делителю. Необходимо обеспечить Uab > 200мВ. Напряжение питания - 5В. Сопротивление среднего плеча - 120Ом//120Ом//12КОм на каждый приемник - примерно 57 Ом (для 10 приемников). Таким образом, выходит примерно по 650 Ом на каждый из двух Rзс. Для смещения с запасом - сопротивление Rзс должно быть меньше 650 Ом. Традиционно ставят 560 Ом.
Обратите внимание: в расчете номинала Rзс учитывается нагрузка. Если на линии висит много приемников, то номинал Rзс должен быть меньше. В длинных линиях передачи необходимо так же учитывать сопротивление витой пары, которое может "съедать" часть смещающей разности потенциалов для удаленных от места подтяжки устройств. Для длинной линии лучше ставить два комплекта подтягивающих резисторов в оба удаленных конца рядом с терминаторами.
Многие производители приемопередатчиков заявляют о функции безотказности (failsafe) своих изделий, заключающейся во встроенном смещении. Следует различать два вида такой защиты:
Безотказность в открытых цепях. (Open circuit failsafe.) В таких приемопередатчиках применяются встроенные подтягивающие резисторы. Эти резисторы, как правило, высокоомные, чтобы уменьшить потребление тока. Из-за этого необходимое смещение обеспечивается только для открытых (ненагруженных) дифференциальных входов. В самом деле, если приемник отключен от линии или она не нагружена, тогда в среднем плече делителя остается только большое входное сопротивление, на котором и падает необходимая разность потенциалов. Однако, если приемопередатчик нагрузить на линию с двумя согласующими резисторами по 120 Ом, то в среднем плече делителя оказывается меньше 60 Ом, на которых, по сравнению с высокоомными подтяжками, ничего существенного не падает. Поэтому, если в нагруженной линии нет активных передатчиков, то встроенные резисторы не обеспечивают достаточное смещение. В этом случае, остается необходимость устанавливать внешние резисторы защитного смещения, как это было описано выше.
Истинная безотказность. (True failsafe.) В этих устройствах смещены сами пороги распознавания сигнала. Например: -50 / -200 мВ вместо стандартных порогов ±200 мВ. То есть при Uab>-50мВ на выходе приемника RO будет логическая "1", а при Uab<-200 - на RO будет "0". Таким образом, и в разомкнутой и в пассивной линии при разности потенциалов Uab близкой к нулю, приемник выдаст "1". Для таких приемопередатчиков внешнее защитное смещение не требуется. Тем не менее, для лучшей помехозащищенности все-таки стоит дополнительно немного подтягивать линию.
Сразу виден минус внешнего защитного смещения - через делитель постоянно будет протекать ток, что может быть недопустимо в системах малого потребления. В таком случае можно сделать следующее:
а). Уменьшить потребление тока, увеличив сопротивления Rзс. Хотя производители приемопередатчиков и пишут о пороге распознавания в 200мВ, на практике вполне хватает 100мВ и даже меньше. Таким образом, можно сразу увеличить сопротивления Rзс раза в два-три. Помехозащищенность при этом несколько снижается, но во многих случаях это не критично.
б). Использовать true failsafe приемопередатчики со смещенными порогами распознавания. Например, у микросхем MAX3080 и MAX3471 пороги: -50мВ / -200мВ, что гарантирует единичный уровень на выходе приемника при отсутствии смещения (Uab=0). Тогда внешние резисторы защитного смещения можно убрать или значительно увеличить их сопротивление.
в). Не применять без необходимости согласование на резисторах. Если линия не будет нагружена на 2 по 120 Ом, то для обеспечения защитного смещения хватит подтяжек в несколько килоом в зависимости от числа приемников на линии.
Для опторазвязанной линии подтягивать следует к питанию и "земле" изолированной линии. Если не применяется опторазвязка, подтягивать можно к любому питанию, так как делитель создаст лишь небольшую разность потенциалов между линиями A и B. Нужно только помнить о возможной разности потенциалов между "землями" устройств, расположенных далеко друг от друга.
5. Исключение приема при передаче в полудуплексном режиме
При работе с полудуплексным интерфейсом RS-485 (прием и передача по одной паре проводов с разделением по времени) можно забыть, что UART контроллера - полнодуплексный, то есть принимает и передает независимо и одновременно.
Обычно во время работы приемопередатчика RS-485 на передачу, выход приемника RO переводится в третье состояние и ножка RX контроллера (приемник UART) "повисает в воздухе". В результате, во время передачи на приемнике UART вместо уровня стопового бита ("1") окажется неизвестно что, и любая помеха будет принята за входной сигнал. Поэтому нужно либо на время передачи отключать приемник UART (через управляющий регистр), либо подтягивать RX к единице. У некоторых микроконтроллеров это можно сделать программно - активировать встроенные подтяжки портов.

Примечание: у микроконтроллера AT90S8535 (AVR Atmel) есть глючок - при отключенном UART он все равно принимает, и после включения на прием первый принятый байт может быть испорчен. Так что активировать подтяжку RX ему нужно обязательно.
6. "Горячее" подключение к линии связи
Насколько я знаю, спецификацией RS-485 не предусмотрено "горячее" подключение - включение новых приемопередатчиков в линию связи во время работы системы. Тем не менее, подобную операцию система переносит практически безболезненно, если учесть один нюанс. Это важно, когда питание на устройство подается в момент подключения, например, когда плата в виде кассеты вставляется в разъем. Дело в том, что во время любого сброса: по включению питания, по сигналу на входе "Reset", по срабатыванию сторожевого таймера - контроллеру требуется время на инициализацию, которое может составлять до нескольких десятков миллисекунд. Пока контроллер находится в состоянии сброса, он принудительно настраивает все порты на вход. Получается ситуация, при которой питание на микросхему приемопередатчика RS-485 уже подано, но входы разрешения приемника /RE и передатчика DE "висят в воздухе". В результате, приемопередатчик может по помехе открыться на передачу и все время пока микроконтроллер в отключке пускать в работающую линию мусор. Избежать этого легко - достаточно через резистор в несколько килоом подтянуть вход разрешения приемника /RE к нулю. Этим приемопередатчик сразу по включении питания настраивается на прием и не лезет на линию.

На физическом уровне линия связи готова к работе, однако, нужен еще и протокол - договоренность между устройствами системы о формате посылок.
По природе интерфейса RS-485 устройства не могут передавать одновременно - будет конфликт передатчиков. Следовательно, требуется распределить между устройствами право на передачу. Отсюда основное деление: централизованный (одномастерный) обмен и децентрализованный (многомастерный).
В централизованной сети одно устройство всегда ведущее (мастер). Оно генерирует запросы и команды остальным (ведомым) устройствам. Ведомые устройства могут передавать только по команде ведущего. Как правило, обмен между ведомыми идет только через ведущего, хотя для ускорения обмена можно организовать передачу данных от одного ведомого к другому по команде ведущего.
В децентрализованной сети роль ведущего может передаваться от устройству к устройству либо по некоторому алгоритму очередности, либо по команде текущего ведущего к следующему (передача маркера ведущего). При этом ведомое устройство может в своем ответе ведущему передать запрос на переход в режим ведущего и ожидать разрешения или запрета.
Последовательный канал по меркам контроллера - штука медленная. На скорости 9600 бод передача одного символа занимает больше миллисекунды. Поэтому, когда контроллер плотно загружен вычислениями и не должен их останавливать на время обмена по UART, нужно использовать прерывания по завершению приема и передачи символа. Можно выделить место в памяти для формирования посылки на передачу и сохранения принятой посылки (буфер посылки), а также указатели на позицию текущего символа. Прерывания по завершению приема или передачи символа вызывают соответствующие подпрограммы, которые передают или сохраняют очередной символ со сдвигом указателя и проверкой признака конца сообщения, после чего возвращают управление основной программе до следующего прерывания. По завершению отправки или приема всей посылки либо формируется пользовательский флаг, отрабатываемый в основном цикле программы, либо сразу вызывается подпрограмма обработки сообщения.
В общем случае посылка по последовательному каналу состоит из управляющих байтов (синхронизация посылки, адресов отправителя и получателя, контрольной суммы и пр.) и собственно байтов данных.
Протоколов существует множество и можно придумать еще больше, но лучше пользоваться наиболее употребительными из них. Одним из стандартных протоколов последовательной передачи является MODBUS, его поддержку обеспечивают многие производители промышленных контроллеров. Но если Вам нужно буквально "два байта переслать" или просто освоить методы связи и не хочется из-за этого изучать систему команд модбаса и писать для него драйвер, предлагаю варианты относительно простых протоколов. (И все-таки в дальнейшем стоит ориентироваться именно на MODBUS.)
Основная задача в организации протокола - заставить все устройства различать управляющие байты и байты данных. К примеру, ведомое устройство, получая по линии поток байтов, должно понимать, где начало посылки, где конец и кому она адресована.
1). Часто встречаются протоколы на основе ASCII-кода. Управляющие символы и данные передаются в виде обыкновенных ASCII символов. Посылка может выглядеть так:
В HEX виде: 3Ah 31h 32h 52h 53h 34h 38h 35h 0Dh
В ASCII виде: ":" "1" "2" "R" "S" "4" "8" "5" /ПС/
В начале управляющий символ начала посылки ":", следующие две цифры - адрес получателя (12), затем символы данных (RS485) и в конце - управляющий символ конца посылки 0Dh (перевод строки). Все устройства на линии, приняв символ ":", начинают записывать в память посылку до символа конца строки 0Dh. Затем сравнивают адрес из посылки со своим адресом. Устройство с совпавшим адресом обрабатывает данные посылки, остальные - игнорируют посылку. Данные могут содержать любые символы, кроме управляющих (":", 0Dh).
Достоинство этого протокола в удобстве отладки системы и простоте синхронизации посылок. Можно через преобразователь RS485-RS232 подключить линию к COM-порту компьютера и в любой терминалке увидеть всю проходящую информацию "на человеческом языке". Недостатки - относительно большой размер посылки при передаче большого количества двоичной информации, ведь на передачу каждого байта нужно два ASCII символа (7Fh - "7", "F"). Кроме того, надо преобразовывать данные из двоичного вида в ASCII и обратно.
2). Можно организовать протокол с непосредственной передачей двоичных данных. При этом управляющие символы и байты данных различаются с помощью настройки дополнительного девятого бита в UART. Для управляющих символов этот бит устанавливается в "1". Первым в посылке передается управляющий символ с единичным девятым битом - остальные его "нормальные" биты могут содержать адрес устройства-получателя, признак начала/конца посылки и что-нибудь еще. Затем передаются байты данных с нулевым девятым битом. Все принимающие устройства узнают по девятому биту управляющий символ и по содержанию его остальных битов определяют, кому адресованы последующие данные. Адресуемое устройство принимает данные, а все остальные игнорируют их до следующего управляющего символа.
UART некоторых контроллеров, например C167 (Infineon) может в особом режиме (wakeup) автоматически распознавать в полученном байте девятый бит и генерировать прерывание при получении только управляющего символа. Адресуемое устройство при этом нужно переключить в режим обычного приема до следующего управляющего символа. Это позволяет остальным устройствам сэкономить время на обработке прерываний при получении байтов данных, адресованных не им.
Если требуется сопряжение системы и компьютера с Windows, такой протокол лучше не применять, так как у Windows могут быть проблемы с распознанием девятого бита в UART.
3) Протокол может быть "чисто" двоичным, то есть без выделения специальных управляющих символов. Синхронизация посылок в этом случае может осуществляться за счет отслеживания паузы между принятыми байтами. Принимающее устройство отсчитывает время с момента последнего приема байта до следующего, и если эта пауза оказывается больше какой-то величины (например, 1.5 - 3.5 байта), делается вывод о потере предыдущей посылки и начале новой. Даже если предыдущая посылка была незакончена - приемный буфер сбрасывается. Можно также синхронизировать посылки по уникальной стартовой последовательности байтов (по аналогии со стартовым символом в ASCII протоколе). В таких протоколах надо принимать особые меры для защиты от приема ложной посылки, начатой из-за помехи.
8. Программные методы борьбы со сбоями
Для повышения надежности связи обязательно нужно предусмотреть программные методы борьбы со сбоями. Их можно условно разделить на две группы: защита от рассинхронизации и контроль достоверности.
1). Защита от рассинхронизации. Несмотря на защитное смещение, сильная помеха может пробиться в линию без активных передатчиков и нарушить правильную последовательность приема посылок. Тогда возникает необходимость первой же нормальной посылкой вразумить принимающие устройства и не дать им принять помеху за посылку. Делается это с помощью синхронизации кадров (активная пауза) и синхронизации посылок (преамбула).
Защита от рассинхронизации кадров. Обязательная мера! Все последующие меры синхронизации посылок имеют смысл только совместно с этой. Помеха ложным старт-битом может сбить правильный прием кадров последующей посылки. Чтобы вернуться к верной последовательности, нужно сделать паузу между включением приемопередатчика на передачу и посылкой данных. Все это время передатчик удерживает в линии высокий уровень, через который помехе трудно пробиться (активная пауза). Паузы длительностью в 1 кадр на данной скорости связи (10-11 бит) будет достаточно для того, чтобы любое устройство, принимавшее помехи приняло стоп-бит. Тогда следующий кадр будет приниматься с нормального старт-бита.

Того же эффекта можно добиться передачей символа FFh перед первым байтом посылки, так как кроме старт-бита, все его биты - "1". (Если старт-бит символа FFh попадет на стоп-бит ложного кадра, будет просто засчитана ошибка кадра).
Защита от рассинхронизации посылок. Применяется совместно с предыдущей защитой! Особо подлая помеха может замаскироваться под управляющий символ и сбить принимаемую затем посылку. Кроме того предыдущая посылка может быть прервана. Из-за этого крайне желательно в подпрограмме приема и сохранения данных предусмотреть меры по опознанию настоящего начала посылки и сбросу приемного буфера посылки (области памяти, куда сохраняются принимаемые байты). Для этого служит преамбула - предварительный признак начала посылки.
Стартовый символ. В ASCII протоколе роль преамбулы играет специальный управляющий символ начала посылки. По каждому приему такого символа нужно сбрасывать буфер: обнулять число принятых байт, перемещать указатель на начало буфера и т.п. То же самое нужно делать при переполнении буфера. Это позволит настоящему управляющему символу сбросить предыдущую "посылку", начатую ложным символом.
Пример. Последний управляющий символ ":" сбросит предыдущую ложную посылку:
____ :) ____ : 1 2 R S 4 8 5 /ПС/ ____
Стартовая пауза. В двоичном протоколе, где не предусмотрен уникальный управляющий символ, и синхронизация посылок идет по заданной паузе между байтами, достаточно увеличить активную паузу, описанную в синхронизации кадров, до длительности паузы между байтами, по которой начинается прием новой посылки. То есть, между включением приемопередатчика на передачу и отправкой первых байтов посылки нужно сделать паузу длительностью в 1.5 - 3.5 кадра UART. При активном передатчике во время такой преамбулы помехе трудно будет прорваться к приемникам, они зафиксируют нужную паузу, сбросят буфер посылки и настроятся на прием новой посылки. Этот метод применяется, в частности, для протокола MODBUS RTU.
Стартовая последовательность. Если в двоичном протоколе синхронизация осуществляется лишь по корректному началу посылки, то отфильтровать ложную посылку можно только по логике ее структуры. Преамбула в данном случае - некоторая стартовая последовательность символов, которая не может встретиться в данных посылки, и которую вряд ли сформирует помеха. Преамбула отсылается перед основной посылкой. Принимающее устройство отслеживает в поступающих данных эту стартовую последовательность. Где бы она не состоялась, принимающее устройство сбрасывает буфер посылки и начинает принимать новую.
Вариант 1. Посылка начинает заново приниматься после приема "go!" (вместо символов могут быть любые 8-битные данные):
____ : - Ь ___ g o ! 1 2 R S 4 8 5 ____
Вариант 2. Посылка начинает заново приниматься после приема не менее трех "E" подряд и стартового байта ":" (вместо символов могут быть любые 8-битные данные):
____ > : - E ___ E E E: 1 2 R S 4 8 5 ____
Даже если до стартовой последовательности было два таких символа подряд, посылка начнет сохраняться только за последовательностью из не менее чем трех подряд (лишние игнорируются) и стартового символа. Если вместо "Е" использовать байт FFh - можно совместить синхронизацию кадров и посылок. Для этого посылаются четыре FFh, а принимающее устройство ожидает не менее трех, с учетом того, что первый байт FFh может уйти на синхронизацию кадров.
2). Контроль достоверности. Особо сильная помеха может вклиниться в посылку, исказить управляющие символы или данные в ней, а то и вовсе уничтожить ее. Кроме того, одно из подключенных к линии устройств (абонент) может выйти из строя и перестать отвечать на запросы. На случай такой беды существуют контрольная сумма, тайм-ауты и квитирование.
Контрольная сумма - в общем случае 1-2 байта кода, полученного некоторым преобразованием из данных посылки. Самое простое - "исключающее или" всем байтам данных. Контрольная сумма рассчитывается и включается в посылку перед отправкой. Принимающее устройство производит ту же операцию над принятыми данными и сверяет рассчитанную контрольную сумму с полученной. Если посылка была повреждена, то, скорее всего, они не совпадут. В случае применения ASCII протокола - код контрольной суммы также передается ASCII-символами.
Тайм-аут - максимальное время ожидания ответа от запрашиваемого устройства. Если посылка была повреждена или запрашиваемое устройство вышло из строя, то ведущее устройство не повиснет в ожидании ответа, а по истечении определенного времени признает наличие сбоя. После чего можно еще пару раз повторить запрос и, если сбой повторяется, перейти на отработку аварийной ситуации. Тайм-аут отсчитывается с момента завершения передачи запроса. Его длительность должна с небольшим запасом превышать максимальное время ответной передачи плюс время, необходимое на обработку запроса и формирование ответа. Ведомому устройству тоже не помешает отработка тайм-аутов. Особенно в ситуациях, когда отсутствие регулярного обновления данных или новых команд от ведущего устройства критично для работы устройств системы. Самая простая реализация для ведомого - сброс сторожевого таймера по приему посылки. Если по какой-либо причине данные перестали поступать - устройство сбросится по переполнению сторожевого таймера. После сброса устанавливается безопасный режим до приема первой команды.
Квитирование - подтверждение доставки (квитанция). Когда важно, чтобы ведомый обязательно получил данные или команду, возникает необходимость проконтролировать получение им посылки. Ведущее устройство, отправив ведомому данные, ждет ответа с подтверждением. Ведомое устройство, получив данные, в случае их корректности посылает ответ, подтверждающий доставку. Если по истечении тайм-аута ведущее устройство не получает подтверждение, делается вывод о сбое в связи или в ведомом устройстве. Дальше обычные меры - повтор посылки. Но тут есть нюанс: повреждена и не получена может быть сама квитанция. Ведущее устройство, не получив квитанцию, повторяет посылку, и ведомое отрабатывает ее повторно. Не всегда это существенно, но если перепосылалась команда типа "увеличить параметр на 1" это может привести к незапланированному двойному увеличению параметра. В таком случае надо предусмотреть что-нибудь типа циклической нумерации посылок, чтобы ведомое устройство отличало повторные посылки от новых и не отрабатывало их.
9. Защита устройств от перенапряжений в линии связи
Разность потенциалов между проводниками линии и между линией и "землей" приемопередатчика, как правило, не должна выходить за пределы -7...+12 В. Следовательно, может потребоваться защита от разности потенциалов между "землями" и от перенапряжений из-за замыкания на высоковольтные цепи.
Разность потенциалов между "землями". При организации сети на основе интерфейса RS-485 следует учитывать неявное присутствие третьего проводника - "земли". Ведь все приемопередатчики имеют питание и "землю". Если устройства расположены недалеко от начального источника питания, то разность потенциалов между "землями" устройств в сети невелика. Но если устройства находятся далеко друг от друга и получают местное питание, то между их "землями" может оказаться существенная разность потенциалов. Возможные последствия - выход из строя приемопередатчика, а то и всего устройства. В таких случаях следует применять гальваническую развязку или дренажный провод.
Гальваническая развязка линии и устройств осуществляется либо опторазвязкой цифровых сигналов (RO, DI, RE, DE) с организацией изолированного питания микросхем приемопередатчиков, либо применением приемопередатчиков со встроенной гальванической развязкой сигналов и питания (например, MAX1480). Тогда вместе с дифференциальными проводниками прокладываются провод изолированной "земли" (сигнальной "земли") и, возможно, провод изолированного питания линии.
Дренажный провод - провод, прокладываемый вместе с витой парой и соединяющий "земли" удаленных устройств. Через этот провод уравниваются потенциалы "земель". При включении устройства в линию дренажный провод следует подсоединять первым, а при отключении - отсоединять последним. Для ограничения тока через дренажный провод его заземляют в каждом устройстве через резистор в 100 Ом (0.5 Вт).

Замыкание на высоковольтные цепи. Если существует опасность попадания на линию или одну из местных "земель" высокого напряжения, следует применять опторазвязку или шунтирующие ограничители напряжения. А лучше и то и другое.
Напряжение пробоя опторазвязанного интерфейса составляет сотни и даже тысячи вольт. Это хорошо защищает устройство от перенапряжения, общего для всех проводников линии. Однако, при дифференциальных перенапряжениях, когда высокий потенциал оказывается на одном из проводников, сам приемопередатчик будет поврежден.
Для защиты от дифференциальных перенапряжений все проводники линии, включая изолированный общий, шунтируются на локальные "земли" при помощи ограничителей напряжения. Это могут быть варисторы, полупроводниковые ограничители напряжения и газоразрядные трубки. Физический принцип их действия разный, но суть одна - при напряжении выше порогового их сопротивление резко падает, и они шунтируют линию. Газоразрядные трубки могут шунтировать очень большие токи, но имеют высокий порог пробоя и низкое быстродействие, поэтому их лучше применять по трехступенчатой схеме вместе с полупроводниковыми ограничителями. Когда заземление линии невозможно, проводники линии шунтируют ограничителями между собой. Но это защитит только от дифференциальных перенапряжений - защиту от общего должна взять на себя опторазвязка.

Защита ограничителями напряжения действенна при кратковременных перенапряжениях. При длительных - токи короткого замыкания могут вывести ограничители из строя, и устройства на линии окажутся без защиты. Для защиты от коротких замыканий в линию можно последовательно включить плавкие предохранители. Подробнее о защите от перенапряжений можно прочитать в руководстве B&B Electronics "RS-422 and RS-485 Application Note" (англ.).
10. Дополнительные меры защиты от помех

Заключение
Я не претендую на полноту сведений о физических и программных тонкостях связи по интерфейсу RS-485. Однако, полагаю, что еще одно изложение темы, немного по другому сформулированное, и к тому же дополненное личным опытом не будет лишним для разработчиков, только начинающих разбираться в этой области. Надеюсь, приведенная информация поможет Вам в организации беспроблемной и надежной связи.
(c) 2003 Евгений Александрович Бень
Максимально возможная дальность линии RS-485 определяется, в основном, характеристиками кабеля и электромагнитной обстановкой на объекте эксплуатации. При использовании кабеля с диаметром жил
0,5 мм (сечение около 0,2 кв. мм) длина линии RS-485 – не более 1200 м,
при сечении 0,5 кв. мм – не более 3000 м.
Использование кабеля с сечением жил менее 0,2 кв. мм нежелательно.
При большой протяжённости линии RS-485 (от 100 м) использование витой пары обязательно.
Для подключения приборов к интерфейсу RS-485 необходимо контакты "A" и "B" приборов подключить соответственно к линиям A и B интерфейса. Интерфейс RS-485 предполагает использование соединения между приборами типа "шина", когда все приборы соединяются по интерфейсу одной парой проводов (линии A и B), согласованной с двух концов согласующими резисторами (рисунок 1).
Рисунок 1. Схема подключения приборов к магистральному интерфейсу RS-485
Для согласования используются резисторы сопротивлением 620 Ом, которые устанавливаются на первом и последнем приборах в линии. Большинство приборов имеет встроенное согласующее сопротивление, которое может быть включено в линию установкой перемычки («джампера») на плате прибора. Поскольку в состоянии поставки перемычки установлены, их нужно снять на всех приборах, кроме первого и последнего в линии RS-485. В преобразователях-повторителях "С2000-ПИ" согласующее сопротивление для каждого (изолированного и неизолированного) выхода RS-485 включается переключателями. В приборах "С2000-К" и "С2000-КС" встроенное согласующее сопротивление и перемычка для его подключения отсутствуют. Если прибор такого типа является первым или последним в линии RS-485, необходимо установить между клеммами "A" и "B" резистор сопротивлением 620 Ом. Этот резистор входит в комплект поставки прибора. Пульт "С2000М" ("С2000") может быть установлен в любом месте линии RS-485. Если он является первым или последним прибором в линии, между клеммами "A" и "B" устанавливается согласующий резистор 620 Ом (входит в комплект поставки). Ответвления на линии RS-485 нежелательны, так как они увеличивают искажение сигнала в линии, но практически допустимы при небольшой длине ответвлений (не более 50 метров). Согласующие резисторы на отдельных ответвлениях не устанавливаются. Ответвления большой длины рекомендуется делать с помощью повторителей "С2000-ПИ", как показано на рисунке 2.

Рисунок 2. Построение сети RS-485 c топологией "звезда" при помощи повторителей
Рисунок 3. Увеличение длины линии RS-485 с помощью повторителей интерфейса
Например, преобразователь – повторитель интерфейсов с гальванической изоляцией "С2000-ПИ" позволяет увеличить длину линии максимум на 1500 м, обеспечивает гальваническую изоляцию между сегментами линии и автоматически отключает короткозамкнутые сегменты интерфейса RS-485 .
Каждый изолированный сегмент линии RS-485 должен быть согласован с двух сторон – в начале и конце. Следует обратить внимание на включение согласующих резисторов в каждом сегменте линии RS-485: они должны быть включены переключателями в повторителях "С2000-ПИ", а не перемычками в приборах, поскольку переключатели не только подключают согласующее сопротивление, но также выдают в линию RS-485 напряжение смещения, которое необходимо для правильной работы этих повторителей. Внимание! Цепи "0В" изолированных сегментов линии между собой не объединяются. Более того, нельзя питать изолированные приборы от общего источника питания во избежание гальванической связи через общие цепи питания.
С помощью повторителей "С2000-ПИ" можно делать длинные ответвления от основной магистрали RS-485 для построения топологии "звезда". При этом должен быть согласован и сегмент, от которого делается ответвление, и каждое из ответвлений, как показано на рисунке 2. Следует обратить особое внимание, что согласующие резисторы на "С2000-ПИ" должны устанавливаться переключателями.
Следующая информация была предоставлена техподдержкой компании "Болид" в процессе переписки.
Если теряется сам пульт, то мы рекомендуем программой rs-485settings в пульте увеличить параметр "пауза перед ответом по RS-232" до 2.
Если теряется прибор «С2000-2», а пульт при этом виден, то рекомендуем проверить, правильно ли поставлены оконечные резисторы R=620 Ом, а также объединены ли "0В" приборов. На всех приборах кроме пульта "С2000" согласующее сопротивление под- ключается, если установлена соответствующая перемычка на плате прибора. Оконечные резисторы должны стоять на первом и последнем приборах.
Если все требования к интерфейсу выполнены, причиной проблемы может быть обрыв одной из линий RS485 ("A" или "B") или ее замыкание на цепь "0 В", шлейф сигнализации прибора или заземленную поверхность (например, в результате защемления ка- беля металлической коробкой двери. Обрыв одной из линий RS-485 не обязательно приведет к потере связи со всеми приборами, если цепи "0 В" приборов и "С2000-ПИ" объединены и линия RS-485 имеет небольшую длину. Но в этом случае уровни сигна- лов RS-485 будут за пределами диапазона, гарантирующего их правильное распознава- ние приемником. Замыкание на "0 В" может произойти и в цепях защиты какого - либо из приборов в результате пробоя защитного диода (представляет собой стабилитрон с большой допустимой импульсной мощностью рассеивания) или из-за заводского брака, например, в результате установки защитного диода в неверной полярности. Такой при- бор может не только сам иметь проблемы со связью с пультом по RS-485, но также мо- жет мешать всем приборам изолированной ветки.
Для начала можно прозвонить линию тестером на отсутствие обрыва или замыкания линии или выходов RS-485 приборов на "0 В". При прозвонке выходов "A" и "B" приборов нужно иметь ввиду, что в целях защиты указанные выходы зашунтированы защитными диодами, причем катод подключен к защищаемому выходу, а анод - к "0 В". Поэтому в исправном приборе в прямой полярности (плюсовой щуп тестера - к выходу, минусовой - к "0 В") выходы прозваниваться не должны, а в обратной (к выходу подключается минусовой щуп тестера), в зависимости от величины измерительного напряжения, тестер может показать низкое сопротивление, соответствующее прямому падению напряжения на диоде (т.е. около 0,6 - 0,7 В). Если выход прозванивается на 0 В в любой полярности, это говорит и "сваривании" защитного диода. Если выход прозванивается в полярности, противоположной указанной, это может свидетельствовать о заводском браке (неправильная установка защитного диода).
Также обращаем Ваше внимание на то, что схемотехника защитных цепей RS-485 в новых версиях приборов была изменена (например, у Сигналов-20П - начиная с версии 2.04). "Новые" исправные защитные цепи не прозваниваются ни в прямой, ни в обратной полярности. ВАЖНО: цепи нужно прозванивать тестером В РЕЖИМЕ ПРОЗВОНКИ ДИ- ОДОВ. В режиме измерения сопротивлений измерительное напряжение у многих тестеров меньше прямого падения напряжения на диоде, поэтому, при прозвонке новых це- пей защиты, исправная цепь защиты может мало отличаться от неисправной (в обоих случаях тестер может показать сопротивление порядка нескольких десятков кОм). Кроме прозвонки цепей "A" и "B" относительно "0 В" в обеих полярностях, имеет смысл сделать аналогичное измерение между "A" и "B" (перемычка, включающая нагрузочное сопротивление линии RS-485, должна быть снята).
Прозваниваться эти цепи не должны при любой полярности измерения (для "новых" цепей защиты).
Более точные выводы можно сделать, если исследовать сигнал в линии RS-485 с помощью осциллографа. Измеряется сигнал между линией "А" и "В" вблизи входа RS-485 прибора и пульта. Щуп осциллографа устанавливается на линию "A", общий - на линию "B" (здесь нужно быть внимательным, поскольку у некоторых осциллографов "общий" вход заземлен через заземляющий контакт вилки, что может вносить искажения или по- мехи, особенно если в системе уже есть другие точки заземления). На осциллографе должны быть видны двухполярные импульсы. Передаче "1" соответствует положитель- ная полярность, передаче "0" - отрицательная. Длина одного бита передаваемой ин- формации - около 0,1 мс. Условие достоверного приема таково: если на входе прием- ника напряжение больше 0,2 В, принимается "1", если меньше -0,2 В - принимается "0". Если же напряжение находится в диапазоне от -0,2 до 0,2 В, результат не определен и работоспособность RS-485 не гарантирована. Следовательно, с помощью осциллог- рафа нужно измерить уровни сигналов "0" и "1" и убедиться, что они удовлетворяют ука- занным условиям. На выходе пульта напряжение сигнала "1" обычно равно около +4 В, напряжение "0" - около -4 В. На выходе "С2000-ПИ" при передаче "0" напряжение будет также около -4 В, а при передаче "1" - около + 0,4 В при одном включенном оконечном резисторе 620 Ом и около 0,22 В - при двух оконечных резисторах. По при переходе из "0" в "1" "С2000-ПИ" формирует короткий (около 0,03 мс) импульс с величиной напряже- ния около +4 В. Если сигнал имеет размах от 0 В до -4 В или от +4 В (или +0,2 В для "С2000-ПИ") до 0 В, можно сделать вывод о замыкании одной из линий RS-485 на цепь "0 В".



