Немного об уровне, авторе и предостережения
Я, автор, пацан 16-17 лет с подмосковной деревни, специализируюсь на написании android-приложений (а там сложнее что-то сжечь), поэтому ответственность за оптимальный подход к решению задач с себя снимаю.Задача
Задача легчайшая – заставить ездить машинку, управляемую Arduino, а пульт заменить андроидом. Но в большинстве моментов пришлось изобретать колесо, потому что в интернетах подходящего решения найдено не было.Понадобится
- Arduino
- Motor Shield (в моем случае две)
- Bluetooth
- Android
- Провода обычные
Основа конструкции
За основу была взята машина Lego Outdoor Challenger (в реальности выглядит менее пафосно). Все, что от нее осталось: корпус (все элементы украшения сняты) и три двигателя.У машинки была своя плата, но одна из задач подразумевала универсальность: это сделал я, это смогут повторить другие. Мозги вынул, поставил Arduino Uno.
Установка Arduino
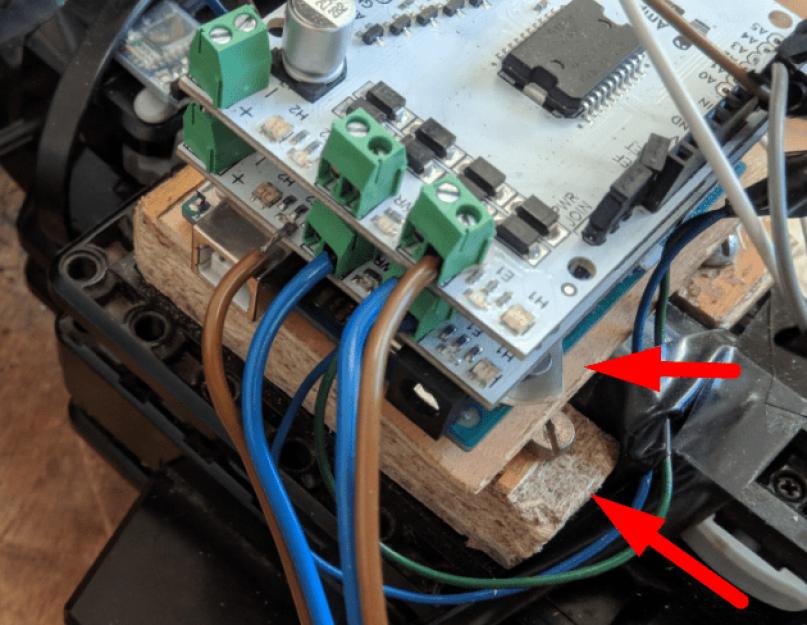
Создатели почему-то не предусмотрели места для Arduino, потому крепил на шурупы, просверлив пластик. Под плату подложил фанеру, чтобы ничего не закоротило. Под шурупы лучше подсунуть что-то пластиковое (кусочек бутылки), ибо плата от железный болтов не защищена.
Поверх платы сразу поставил две motor shiled, так надо. Чтобы управлять второй, придется прокинуть один провод с любого digital порта на H1 (направление) и второй с пина с поддержкой шима (помечены знаком «~», обычно 10, 11) на E1 (скорость).

Определение угла поворота
За поворот машинки отвечает на удивление не сервопривод, а обычный двигатель. Встает проблема: хорошо бы было его не сжечь, ведь угол поворота ограничен, а крутиться двигатель может сколько угодно.Вариант с методом тыка отпадает, так как при разном уровне батареи количество тока, подаваемое на двигатель, будет изменяться, что приведет к постоянно меняющемуся углу. Крутить до упора тоже нельзя, рано или поздно рассыплются шестеренки.
Решение проблемы: отслеживать угол через замыкание. На фото продемонстрирована небольшая штучка, которая крепится недалеко от поворотного механизма. На часть, которая крутится вместе с колесами влево/вправо двигателем, прикрепляется гребешок с железными контактами.


Принцип работы: к каждой линии припаивается провод (всего их четыре), нижний подключается к плюсу (он зажат гребешком всегда, см. картинку), остальные провода уходят на минус. Когда зубик гребешка попадает и на нижний ряд, и на, допустим, третий, происходит замыкание, ток течет, это замечает Arduino.

Благодаря различным комбинациям трех полос, можно определить до семи углов. Например, когда ток есть на всех линиях, колеса повернуты в крайнее правое положение, когда ток есть только на верхней, колеса повернуты максимально влево. В таблице предоставлены все варианты.

Подключение угла и код
Для каждого уровня был выбран свой цвет: нижний – зеленый, первый снизу – красный, второй – черный, третий – белый. На начальном этапе использовались breadboard и светодиоды для визуальной отладки.
Схема подключения показана на рисунке. Плюс тянем к зеленому, остальные протягиваем к минусу. Через резистор, установленный для устранения помех и отсутствия КЗ, подключаем провода к выходам A0-A2. Выбраны они просто из экономии остальных портов.
Код дан с комментариями. Подключаем пины и опрашиваем их через digitarRead(). Если напряжение есть, вернется значение true. Далее смотрим, если результат означает, что колеса в крайних положениях, запрещаем дальнейший поворот в эту сторону.
Небольшая хитрость: поскольку выходы на 5В и 3.3В понадобятся в будущем, можно поставить плюс на один из digital-пинов. Перед каждой проверкой угла выдавать ток через digitalWrite(whitePin), потом проверять угол и убирать ток.
Int speedTurn = 180; //скорость поворота, от 0 до 255 //пины для определения поворота int pinRed = A0; int pinWhite = A1; int pinBlack = A2; int pinAngleStop = 12; //выводит ток на светодиод, если достигнут максимальный угол, нужен //только для отладки void setup() { //пины поворота на считывание pinMode(pinRed, INPUT); pinMode(pinBlack, INPUT); pinMode(pinWhite, INPUT); //светодиод pinMode(pinAngleStop, OUTPUT); //пины драйвера двигателя, направление и скорость pinMode(angleDirection, OUTPUT); pinMode(angleSpeed, OUTPUT); Serial.begin(9600); } //функция вызывается из loop(), когда приходит команда с андроида void turn(int angle) { digitalWrite(pinAngleStop, HIGH); //выдаем ток на провод, подключенный к плюсу delay(5); //немного ждем, чтобы ток "успел" дойти if(angle > 149) { if(digitalRead(pinWhite) == HIGH && digitalRead(pinBlack) == LOW && digitalRead(pinBlack) == LOW) { //если достигнуто крайне правое положение, выйти из функции не подавая ток, чтобы не //сжечь мотор return; } //если угол не максимальный, поворачиваем digitalWrite(angleDirection, HIGH); analogWrite(angleSpeed, speedTurn); } else if (angle < 31) { if(digitalRead(pinRed) == HIGH && digitalRead(pinBlack) == HIGH && digitalRead(pinWhite) == HIGH) { //если достигнуто крайне левого положение, выйти из функции не подавая ток, чтобы не //сжечь мотор return; } //если угол не максимальный, поворачиваем digitalWrite(angleDirection, LOW); analogWrite(angleSpeed, speedTurn); } digitalWrite(pinAngleStop, LOW); //убираем ток с определителя угла delay(5); }
Распараллеливание ходовых колес
Изначально два ходовых двигателя соединены вместе. Их рассоединил по двум причинам: поворот эффективней, если колеса крутятся в разные стороны, и два мощных двигателя одна плата не вытянет.Проблема: у motor shield два выхода, каждый из которых выдает до 2 ампер. Каждый двигатель ест по 0,7А. Вроде меньше, но не при максимальных нагрузках. Допустим, машинка застряла в песке или уперлась, ток возрастает выше ампера. Не критично, но потенциально опасно.
А вот критичным оказалось то, что плата греется. Через минуты полторы после заезда, motor shield нагревалась и начинала работать безобразно: токи подаются не те, колеса не крутятся и прочее.
Решение обоих проблем: один двигатель подключил к одной motor shield, второй – к другой. Как ни странно, помогло. Температура упала, перегрев отсутствует. Можно было поставить радиатор, но крепить тяжело.

Подключение Bluetooth
Я использовал модель HC-05, что сыграло роковую шутку. Подключаются все блютузы одинаково: один провод на 3.3В (иногда начинал работать только от 5В), второй на минус, еще два на порт 0 и 1 (чтение и отправка соответственно). Провод, подписанный RXD на bluetooth, втыкается в TXD ардуино, а TXD в RXD (если перепутаете, то данных не увидите).Есть оговорка: порты 0 и 1 по умолчанию используются Serial, через который заливает скетч. То есть, пока воткнут блютуз, скетч не зальется. Есть два выхода: вынимать блютуз на время заливки или переназначить входы и выходы блютуза. Второй вариант осуществляется двумя строчками
#include
Подводный камень, съевший у меня трое суток работы – скорость общения. По привычке установил 9600 и пошел пробовать. То данные не приходили, то была каша символов. И в конце концов ответ – модель HC-05 общается на 38400! Очень сильно обратите внимание на то, что в Setup() я выполню BTSerial.begin(39400), хотя Serial.begin(9600).
Система отправки команд
Статья становится слишком длинной, поэтому рассмотрение кода Arduino и Android вынесу в отдельную вторую часть, а сейчас опишу принцип.На андроид устройстве есть джойстик (круг, о реализации которого также во второй части). Андроид считывает показания с него и конвертирует их в подходящие для ардуино числа: скорость из пикселей превращает в значение от -255 до 255 (отрицательные – задний ход), а также определяет угол. Я сознательно отдал эту задачу телефону, так как он куда мощнее и спокойно справится с подсчетом нескольких сотен значений в секунду.

После установки сокета данные отправляются в следующем формате: @скорость#*угол#. @ - говорит о том, что следующие цифры содержат скорость, # - извещает об окончании значения скорости, * - начало значения угла, # - закончить запись угла. Цикл бесконечен, команды отправляются каждые 100 миллисекунд (цифра подобрана оптимальная). Если ничего не нажато на андроиде, то ничего и не отправляется.
Алгоритм приема данных подробно описан в коде скетча. Он не раз переписывался и, как по мне, работает идеально.
Заключение первой части
В этой статье я попытался раскрыть все, что касается физической части машинки. Вероятнее всего, что-то упустил, так что обязательно спрашивайте.Но самое интересное, как по мне, осталось на второе – программа Arduino и приложение на Android, там творится настоящая магия, по крайней мере, для молодого меня.
Если вы не найдете ответа на какую-то часть и захотите потыкать меня в недостатки лично, жду – [email protected], .
UPD: вторая часть уже вышла -
Сейчас снова хочу предоставить вам интересный вариант «Управляем Arduino-машинкой при помощи G-сенсора на Android смартфоне»
В данной статье я вам расскажу, как при помощи данного сервиса RemoteXY очень легко настроить дистанционное управление платформой или машинкой. Робомашинкой мы будем управлять при помощи элемента управления «Джойстик», который умеет работать от G-сенсора вашего смартфона. В конце статьи вы найдете видео и можете посмотреть, что же у нас получилось.
Мы собрали очень простую двухколесную тележку, что бы продемонстрировать вам, как построить систему дистанционного управления. В тележке использованы следующие компоненты (мы не претендуем на качество изготовления, тележка собрана для демонстрации возможностей ресурса RemoteXY):
- Платформа — ее мы вырезали из листового материала. Для простоты использовали ДВП;
- Переднее колесо — поворотное колесико от кресла;
- Мотор-редукторы 2 шт.;
- Колеса , с осью подходящей к мотор-редукторам 2 шт. Колеса мы приобретали совместно с мотор редукторами;
- Батарейный отсек с выключателем, на 4-е пальчиковые батарейки (тип АА);
- Arduino , мы использовали все тот же клон Seeeduino;
- Модуль Bluetooth HC-06 ;
- Драйвер моторов на чипе L298N;
Все детали можно заказать на китайском сайте за копейки. Правда придется ждать немного. но лучше сэкономить чем переплатить
Электрическая часть и схема подключения всех модулей машинки представлена на следующем рисунке.

Программа управления
Войдите в редактор на этом ресурсе и сконструируйте следующий интерфейс управления:
Установите по центру экрана «Джойстик». В свойствах джойстика выберите установку дополнительного элемента управления «Включить G сенсор». Выберите положение переключателя G-сенсора «Низ-лево». Так же в настройках можете изменить цвет на красный. В дальнейшем джойстиком мы будем управлять движением машинки.
Установите «Переключатель». Разместите его левее джойстика. Можете так же изменить его цвет. Переключателем мы будем управлять светодиодом на плате Arduino на пине 13.
Если вы все правильно сделали, у вас должен получиться примерно такой интерфейс управления:
В настройках проекта выберите целевую платформу, для которой мы получаем исходный код «Arduino (SoftwareSerial)». Нажимаем кнопку «Получить код» и загружаем исходный код на свой компьютер.
Откроем загруженный скетч в IDE Arduino. Скетч прекрасно компилируется без ошибок. Однако, в нем конечно же нет кода для управления нашей машинкой. Наша задача написать этот код. Для образца мы будем использовать загруженный пример.
Обратите внимание на определение структуры RemoteXY_TypeDef в файлеremotexy.h . Структура содержит поля, полностью соответствующие установленным на интерфейсе управления элементам управления. Мы видим переменные joystick_1_x иjoystick_1_y , отражающие координаты x и y нашего джойстика, а так же переменную switch_1 , отражающую переключатель.
/* структура определяет все переменные вашего интерфейса управления */ typedef struct {
/* input variable */ signed char joystick_1_x; /* =-100..100 координата x положения джойстика */ signed char joystick_1_y; /* =-100..100 координата y положения джойстика */ unsigned char switch_1; /* =1 если переключатель включен и =0 если отключен */
/* other variable */ unsigned char connect_flag; /* =1 if wire connected, else =0 */
} RemoteXY_TypeDef;
Далее приводится основной код программы, в который уже встроено управление моторами нашей машинки. Вы можете просто скопировать данный код в свой скетч, или же выборочно добавить необходимые куски кода в загруженный пример.
#include
/* определяем пины управления правым мотором */
#define PIN_MOTOR_RIGHT_UP 7
#define PIN_MOTOR_RIGHT_DN 6
#define PIN_MOTOR_RIGHT_SPEED 10
/* определяем пины управления левым мотором */
#define PIN_MOTOR_LEFT_UP 5
#define PIN_MOTOR_LEFT_DN 4
#define PIN_MOTOR_LEFT_SPEED 9
/* определяем пин управления светодиодом */
#define PIN_LED 13
/* определяем два массива с перечислением пинов для каждого мотора */
unsigned char RightMotor = {PIN_MOTOR_RIGHT_UP, PIN_MOTOR_RIGHT_DN, PIN_MOTOR_RIGHT_SPEED};
unsigned char LeftMotor = {PIN_MOTOR_LEFT_UP, PIN_MOTOR_LEFT_DN, PIN_MOTOR_LEFT_SPEED};
/*
управление скоростью мотора
motor — ссылка на массив пинов
v — скорость мотора, может принимать значения от -100 до 100
*/
void Wheel (unsigned char * motor, int v)
{
if (v>100) v=100;
if (v<-100) v=-100;
if (v>0) {
digitalWrite(motor, HIGH);
digitalWrite(motor, LOW);
analogWrite(motor, v*2.55);
}
else if (v<0) {
digitalWrite(motor, LOW);
digitalWrite(motor, HIGH);
analogWrite(motor, (-v)*2.55);
}
else {
digitalWrite(motor, LOW);
digitalWrite(motor, LOW);
analogWrite(motor, 0);
}
}
void setup()
{
/* инициализация пинов */
pinMode (PIN_MOTOR_RIGHT_UP, OUTPUT);
pinMode (PIN_MOTOR_RIGHT_DN, OUTPUT);
pinMode (PIN_MOTOR_LEFT_UP, OUTPUT);
pinMode (PIN_MOTOR_LEFT_DN, OUTPUT);
pinMode (PIN_LED, OUTPUT);
/* инициализация модуля RemoteXY */
RemoteXY_Init ();
void loop()
{
/* обработчик событий модуля RemoteXY */
RemoteXY_Handler ();
/* управляем пином светодиода */
digitalWrite (PIN_LED, (RemoteXY.switch_1==0)?LOW:HIGH);
/* управляем правым мотором */
Wheel (RightMotor, RemoteXY.joystick_1_y — RemoteXY.joystick_1_x);
/* управляем левым мотором */
Wheel (LeftMotor, RemoteXY.joystick_1_y + RemoteXY.joystick_1_x);
}
В самом начале определяются номера пинов, которые будут использованы для управления моторами. Далее номера пинов группируются в два массива, для правого и левого мотора соответственно. Для управления каждым мотором через драйвер на чипе L298N необходимо использовать 3 сигнала: два дискретных, указывающих направление вращения мотора, и один аналоговый, определяющий скорость вращения. Данными преобразованиями у нас занимается функция Wheel . На вход функции передаем ссылку на массив пинов выбранного мотора, и скорость вращения как знаковое число от -100 до 100. Если передали скорость 0, то мотор отключается.
В предопределенной функции setup настраиваются пины на работу как выходы. Для аналогового сигнала используются пины, которые могут работать как ШИМ преобразователи. Это пины 9 и 10. Они не требуют настройки в среде Arduino.
В предопределенной функции loop в каждой итерации работы программы вызывается обработчик модуля RemoteXY. Далее происходит управление зажиганием светодиода, далее управление моторами. Для управления моторами из структуры RemoteXY считываются поля по координатам джойстика X и Y, на основе координат выполняется математическая операция расчета скорости для каждого мотора, и вызывается функция Wheel , задающая скорость мотора. Данные вычисления выполняются в каждом цикле работы программы, обеспечивая непрерывность вычисления управляющих импульсов моторов на основе координат джойстика.
Залейте получившейся скетч Arduino в контроллер. Загрузите и запустите Android мобильное приложение на ваш смартфон или планшет. Соединитесь с вашим устройством и можете им управлять. Джойстиком можно управлять в обычном режиме, перемещая движок пальцем. Можно включить G-сенсор, и движок джойстика будет перемещаться сам в зависимости от наклона вашего смартфона.
Если после сборки вашего устройства, один или оба мотора вращаются в противоположном направлении, поменяйте провода местами при подключении мотора.
Главный источник информации - easyelectronics.com
Одной ардуины здесь не хватит. Еще понадобятся:
-силовые модули для управления двигателями и светом
-модуль источника питания
-модуль связи
Ардуина - это только мозги, причем довольно хилые.
Вопрос совместимости моторчика с ардуиной особого смысла не несет. Дело в том, что напрямую к ардуине практически никакой моторчик подключить нельзя, она сгорит.
Между ардуиной и моторчиком будет посредник - силовой модуль. Благодаря этому, ардуина фактически совместима с любым двигателем.
По поводу "где купить" - либо онлайн магазины, либо магазины электронных компонентов. Ищите поиском в вашем городе. В крупных городах можно купить все в одном месте, но переплатив раза в 1,5-5 по сравнению с али.
Как бы делал машинку я.
В качестве мозгов высокого уровня и модуля связи я бы взял что-то из ESP32 или ESP8266. Первая работает с bluetooth и wifi. Вторая работает только c wi-fi.
В качестве контроллера периферии сойдет и ардуина. Но! Я бы не стал городить огород из кучи плат и проводов - вероятнее всего, это не влезет в корпус машинки, а если и влезет - будет очень страшным.
Поэтому все компоненты этой конструкции я бы разместил на специально разработанной печатной плате, которую потом по моему заказу изготовит какой-нибудь Резонит.
1) Зависит от вашего местоположения и допущения в небольшой переплате. Можно всё необходимое заказать из Китая, если готовы ожидать 14-40 суток, что позволит сэкономить небольшую часть общей суммы.
Сам лично заказывал у следующих товарищей:
Проблем, соответственно, никаких не возникло.
2) Если уж на то пошло, то необходимо два DC-двигателя и один серво. Просто вбиваете "DC motor" и "Servo".
Примеры выдачи:
При выборе серво необходимо обратить внимание на шестерёнки и конечно же развиваемую тягу. В принципе, для банальной игрушечной машинки хватит и первого варианта из приведённых в примере. Но на будущее имейте в виду, что пристава "MG" подразумевает металлические шестерёнки, что делает в общем устройство более устойчивым к поломке, хотя и не сводит на нет их.
Для управления всей этой системой вам также потребуется так называемый "motor shield":
Первый из приведённых примеров благодаря наличию сдвигового регистра и двух мостов позволяет одновременно управлять четырьмя моторами. Единственное, в чём будет проблема - питание, т.к. для адекватного функционирования каждого требуется от 5V, иначе могут быть проблемы с развиваемой мощностью.
В принципе, вторым также можно управлять сразу четырьмя колёсами, подключив их просто попарно (для поворота использовать разность скоростей сторон). Но в вашем случае достаточно будет и второго варианта. Тем более он допускает использование больших токов, нежели первый.
3) Просто приобретаете светодиоды и подключаете их либо напрямую (не забывая о резисторах) либо через какую-либо из микросхем.
"Diod"
4) Банально устанавливаете себе Arduino IDE и используете C/C++
Ресурсы для изучения:
p.s. что касается удалённого доступа, то обрати внимание на ответ товарища выше
1) Где купить сам Arduino?
Да
2) Какие двигатели совместимы будут с данным одноплатником? Нужна пара двигателей для хода машинки и так понимаю нужен шаговый двигатель для поворотов машинки.
Любые, но на прямую ни какой двигатель подключать нельзя, нужен специальный шильд управления двигателями, например, такой . Для поворотного механизма используются не шаговые двигатели, а
Машинка на arduino и Bluetooth без редактирования кода. Мы будем использовать специализированный бесплатный софт для составления скетча. Кроме того не надо покупать шасси для нашей поделки, подойдет практически любая неисправная радиоуправляемая модель автомобиля или танка.
Предлагаю посмотреть обзорный видеоролик про блютуз-управляемую машинку и ее начинку.
Итак, давайте разберем на живом примере как сделать своими руками дистанционно управляемую по bluetooth c android планшета или смартфона машинку. Статья, как ни странно, рассчитана на начальный уровень знаний. Здесь нет руководства по редактированию кода в Arduino IDE, да и мы использовать его будем только для заливки нашего кода. А составлять алгоритм управления будем в программе под названием FLProg. Программа управления со смартфона — HmiKaskada_free. Но сначала о железе, которое нам понадобится.
Машинка на arduino и Bluetooth — аппаратная часть.
Первое что необходимо это шасси , то есть корпус с колесами и моторчиками, который и будет ездить на радость нам и окружающим. В моем случае был использован корпус от радиоуправляемой игрушки в которой выгорела силовая часть. Перспектива ремонта мне показалась унылой, да и хотелось чего то нового для своих детей. Так и родился этот проект. В корпусе стоят два двигателя которые приводят в движение колеса по бортам машинки, как у танка. Вся электронная начинка отправилась на запчасти.
Для управления электродвигателями нашего будущего творения понадобится Н-мост на микросхеме L298N Ссылка на Али, я брал у именно этот. Картинка кликабельна.
Н-мост для arduino
Может управлять двумя двигателями в диапазоне напряжений 5 — 35 вольт. Поддерживает ШИМ, то есть можно регулировать обороты двигателей. На плате есть вывод стабилизированного напряжения 5 вольт для питания ардуино.
Схема подключения проста и незатейлива:

Следующей неотъемлемой частью электронной начинки нашего проекта является bluetooth модуль HC-06 . Самый обычный модуль для ардуино, настолько популярен что в дополнительном описании не нуждается.

HC-06 bluetooth for arduino
Основным элементом и мозгом в моем случае выступает arduino nano , тут даже фото выкладывать не буду ибо все о ней знают и умеют с ней работать. Кстати подойдет любая плата ардуино, лишь бы в корпус поместилась 😀
Аккумуляторы и провода для пайки в определении спецификации не нуждаются. Выбор аккумуляторов зависит от рабочего напряжения электродвигателей.
Машинка на arduino и Bluetooth — составление скетча.
Повторюсь — никакого копания в коде тут не будет. Мы будем использовать популярную программу FLProg. Скачать ее последнюю версию можно на официальном сайте . Интерфейс проги прост и незатейлив, но имеется огромный функционал и поддержка практически всех популярных модулей. Как ей пользоваться писать не буду так как это потянет на пару статей. Скажу только что я не встречал более удобной и доступной программы для составления скетчей для arduino и ее клонов. Скрин интерфейса:

Интерфейс FLProg
На сайте полно текстовых и видео мануалов, думаю разберетесь.
Мой проект для дистанционно-управляемой машины можно скачать с яндекс-диска через сервис сокращения ссылок.
Машинка на arduino и Bluetooth — интерфейс управления на планшете android.
По многочисленным просьбам написал подробную инструкцию по разработке интерфейса управления на базе HmiKaskada android в статье . Ссылка кликабельна.
Для устройств под управлением android существует программа HmiKaskada (ссылка на ЯндексДиск) . Изначально она разрабатывалась как альтернатива дорогим промышленным HMI панелям. Но пытливые умы быстро смекнули что управлять она может чем угодно. В нашем случае машинкой. Поддерживает беспроводные интерфейсы Wi-Fi и Bluetooth, кроме того можно девайс подключить напрямую через USB.
Есть платная и бесплатная версии программы. У меня есть обе но я принципиально сделал проект в бесплатной версии что бы показать вам и в очередной раз убедиться в абсолютной работоспособности free версии. Основное отличие free от PRO версий это работа только по блютуз.
На форуме FLProg есть гигантская ветка по вопросу совместимости с КаСкадой, да и разработчик активен и общителен. Скрин панели управления выкладывать не вижу смысла — он есть в видеоролике.
Это первый роботизированный проект, который я когда-либо делал, и если вы никогда не пробовали собрать робота, то, скорее всего, думаете что это сложно. Но Ардуино и шасси 2WD / 4WD сделают вашу сборку намного проще, и вы соберете своего первого робота с радиоуправлением на Ардуино без каких-либо мучений.


По пути ко мне пришла идея о создании радиоуправляемой машины своими руками, которая бы объезжала препятствия, поэтому я собрал и этот проект, видео и файл программы к которому прикладываю ниже.
Файлы
Шаг 1: Нужные части и инструмент

Я воспользовался готовыми решениями, и все запчасти и инструменты были приобретены через интернет.
Запчасти:
- Набор шасси 4WD для робота (GearBest)
- Arduino Nano (GearBest)
- Модуль H-моста LM298 (GearBest)
- Модуль bluetooth HC-06 (Amazon)
- Литий-ионные батарейки 2 x 18650 (GearBest)
- Отсек для батареек 2x 18650 (GearBest)
- Небольшая макетная плата (GearBest)
- Провода сечением 0.5 мм2
- Провода с джамперами папа-мама (Amazon)
- Провода с джамперами мама-мама (Amazon)
- Малярная лента, изолента или что-то подобное (Amazon)
Для робота, объезжающего препятствия:
Ультразвуковой модуль измерения расстояния HC — SR04 (GearBest)
Необходимый инструмент:
- Паяльник (Amazon)
- Кусачки (Amazon)
- Стриппер для провод (GearBest)
- Клеевой пистолет (GearBest)
Шаг 2: Что такое робот?
Робот – это электромеханическое устройство, которое способно каким-либо образом реагировать на окружающую обстановку и принимать самостоятельные решения или действия, чтобы достичь определенных целей.
Робот состоит из следующих компонентов:
- Структура / Шасси
- Привод / Мотор
- Контроллер
- Вводные устройства / Датчики
- Источник питания
В следующих шагах я опишу каждый из этих компонентов, и вы всё легко поймёте.
Шаг 3: Структура / Шасси



Структура состоит из физических компонентов. Робот имеет один или несколько физических компонентов, которые каким-либо образом двигаются для выполнения задания. В нашем случае структура робота – это шасси и колёса.
Шаг 4: Приводы



Под приводом можно понимать устройство, которое преобразовывает энергию (в робототехнике под энергией понимается электрическая энергия) в физическое движение. Большинство приводов производят вращательное или линейное движение.
В нашем случае привод – это DC-мотор, скорость которого равна 3000 оборотам в минуту, а вращающий момент 0.002 Н м. Теперь добавим к нему шестерню с передаточным числом 1:48. Новая скорость уменьшается на коэффициент 48 (в результате давая 3000/44 = 68 оборотов в минуту) и вращающий момент увеличивается на коэффициент 48 (в результате давая 0.002 x 48 = 0.096 Н м).
Шаг 5: Подготавливаем клеммы моторчиков




Отрежьте по 4 провода красного и черного цвета длиной примерно 12-15 см. Я использовал провода сечением 0.5 мм2. Оголите концы проводов. Припаяйте провода к клеммам моторчиков.
Вы можете проверить полярность моторчиков, соединив их с отсеком для батареек. Если он движется в прямом направлении (с красным проводом на позитивной и черным на негативной клеммах батареек), то с соединением все в порядке.
Шаг 6: Устанавливаем мотор




Прикрепите две акриловые распорки к каждому мотору при помощи двух длинных болтов и двух гаек. Для наглядности вы можете посмотреть видео .
Возьмите на заметку, что провода на каждом моторе ведут к центру шасси. Соедините оба красных и оба черных провода от моторов с каждой стороны шасси. После соединения у вас будет две клеммы на левой стороне и две на правой.
Шаг 7: Устанавливаем крышу

Послу установки 4 моторов нужно установить крышу. Приладьте 6 медных стоек при помощи гаек, клеммы проводов выведите сквозь отверстие в крыше.
Шаг 8: Контроллер

Теперь у нас установлены шасси и приводы, но нам не хватает контроллера. Шасси без контроллера никуда не поедут. Робот будет оставаться на месте, оставаясь безжизненным. Поэтому, для того чтобы робот перемещался, нам нужен мозг (контроллер).
Контроллер – программируемое устройство, способное работать по заданной программе и отвечающее за все вычисления, принятие решений и коммуникацию. В нашем случае в качестве контроллера мы используем микроконтроллер Ардуино Нано.
Контроллер принимает входные данные (с датчиков, удалённо и т.д.), обрабатывает их и затем даёт команду приводам (моторам) выполнить выбранное задание.
Если вы подключите позитивный провод от батарей на одну строну моторчика, затем подключите негативный провод от батарей на другой контакт моторчика, то он начнёт крутиться вперёд. Если вы поменяете провода местами, то мотор начнёт вращаться в другую сторону.
Микроконтроллер можно использовать, чтобы вращать мотор в одном направлении, но если вам хочется с помощью микроконтроллера вращать мотор и вперёд, и назад, то вам нужна дополнительная схема – H-мост. В следующем шаге я объясню, что это такое.
Шаг 9: Н-мост (модуль LM 298)




Что такое Н-мост?
Термин Н-мост произошел от типичного графического представления этой схемы. Это схема, которая может вращать мотор как в прямом, так и в обратном направлении.
Принцип работы:
Посмотрите приложенную картинку для понимания принципа работы схемы Н-моста. Мост состоит из 4 электронных выключателей S1, S2, S3, S4 (транзисторы / MOSFET/ IGBTS).
Когда выключатели S1 и S4 закрыты, а остальные два открыты, положительное напряжение будет проходить через мотор, и он будет вращаться в прямом направлении. Таким же образом, когда закрыты выключатели S2 и S3, а S1 и S4 открыты, обратное напряжение будет даваться на мотор и он начнёт вращаться в обратном направлении.
Заметка: выключатели на одной руке (то есть S1, S2 или S3, S4) никогда не закрываются одновременно – это создаст короткое замыкание.
Н-мосты доступны в виде интегральных схем, либо можно собрать свой мост при помощи 4 транзисторов или MOSFET. В моём случае используется интегральная схема Н-моста LM298, которая позволяет управлять скоростью и направлением моторов.
Описание распиновки:
Out 1: DC мотор 1 «+» или шаговый двигатель A+
Out 2: DC мотор 1 «-» или шаговый двигатель A-
Out 3: DC мотор 2 «+» или шаговый двигатель B+
Out 4: вывод мотора B
12v: вход 12V, но можно использовать от 7 до 35V
GND: Земля
5v: выход 5V, если джампер 12V стоит на месте, идеально для питания Arduino (и т.п.)
EnA: позволяет получать сигналы PWM для мотора A (Пожалуйста, прочитайте секцию «Arduino Sketch Considerations»)
IN1: включает мотор A
IN2: включает мотор A
IN3: включает мотор B
IN4: включает мотор B
BEnB: позволяет получать сигналы PWM для мотора B (Пожалуйста, прочитайте секцию «Arduino Sketch Considerations»)
Шаг 10: Входы / Датчики

В отличие от людей, роботы не ограничены лишь зрением, звуком, осязанием, обонянием и вкусом. Роботы используют различные датчики для взаимодействия с внешним миром.
Датчик – это устройство, которое выявляет и отвечает на определенные типы входящей информации из окружающего мира. Этой информацией может быть свет, тепло, движение, влажность, давление или любое другое явление окружающей среды.
Входящие сигналы могут идти от датчиков, удалённо, или со смартфона. В этом руководстве я использую смартфон в качестве девайса, отправляющего сигналы, управляющие роботом.
Шаг 11: Источник питания







Чтобы управлять приводами (моторами) и питать контроллер, роботу нужен источник питания. Большинство роботов питается от батарей. Когда мы говорим о батареях, то имеем в виду множество вариантов:
- Алкалиновые батарейки AA (не заряжаются)
- Никель-металгидридные или никель-кадмиевые батарейки AA (заряжаются)
- Литий-ионные батареи
- Литий-полимерные батареи
В зависимости от ваших нужд, нужно выбрать подходящий вид батарей. По-моему мнению, нужно всегда выбирать заряжаемые батареи достаточной ёмкости. Я использовал 2 литий-ионные батареи стандарта 18650 ёмкостью 2600mAh. Если для автономности вам нужно больше мощности, используйте большой комплект батарей, например 5A turnigy.
Отсек для батарей:
Отсек для батарей я заказал в Китае, он не подходил для батарей с плоским верхом, поэтому я использовал два неодимовых магнита для придания батарейкам нужной формы.
Зарядка:
Для зарядки батарей нужен хороший зарядник. По моему опыту, эти зарядники хорошо зарекомендовали себя:
- PowerEx AA Charger-Analyzer (Amazon)
- XTAR LiIon Battery Charger (Amazon)
- Turnigy LiPo Battery Charger (Amazon)
Шаг 12: Установка компонентов


Цельная схема устанавливается на крыше. Отсек для батарей, драйвер двигателей LM 298 и маленькую макетную плату я закрепил горячим клеем, но можно просто прикрутить их. Модуль bluetooth закрепляется скотчем. Ардуино нано вставьте в макетную плату.
Шаг 13: Электропроводка






Для соединения модулей понадобятся провода с джамперами.
Соедините красные провода двух моторов вместе (на каждой стороне) и затем черные провода. В итоге у вас выйдет по две клеммы с каждой стороны.
MOTORA отвечает за два правых мотора, соответственно два левых мотора соединены с MOTORB.
Для соединения всех компонентов следуйте инструкции:
Соединение моторов:
Out1 -> красный провод левостороннего мотора (+)
Out2 -> черный провод левостороннего мотора (—)
Out3 -> красный провод правостороннего мотора (+)
Out4 -> черный провод правостороннего мотора (—)
LM298 — > Arduino
IN1 -> D5
IN2-> D6
IN2 ->D9
IN2-> D10
Модуль Bluetooth -> Arduino
Rx-> Tx
Tx ->Rx
GND -> GND
Vcc -> 3.3V
Питание
12V — > красный провод батарей
GND -> черный провод батарей и пин GND на Arduino
5V -> соедините с пином 5V Arduino
Шаг 14: Логика управления

Чтобы понять принцип работы, я создал эту логическую таблицу. Она очень пригождается во время написания кода.
Шаг 16: Тестирование



Чтобы проверить робота-машину, я положил её на маленькую картонную коробку. Таким образом, колёса будут крутиться, но машинка будет оставаться на месте. Проверьте работоспособность, нажимая все доступные кнопки. Если всё работает, то можно по-настоящему управлять ей.
Заметка: если моторы вращаются в противоположном направлении, то просто поменяйте местами провода.
Шаг 17: Планы на будущее




В этом руководстве я объяснил, как создать простенькую машинку. Дальше я хочу добавить в неё некоторые улучшения. Вы можете присоединить к ней различные датчики, вот некоторые идеи:
- Добавление ультразвукового датчика для объезда препятствий
- Использование модуля WiFi, например ESP8266 или Node MCU вместо Bluetooth, для удлинения дистанции управления.
- Добавление солнечной панели для зарядки батарей.