Что общего между женской грудью и игрушечной железной дорогой? Правильно, и то, и то предназначено для детей, а играют с ними папы. Несколько дней назад я обзавёлся роботехническим конструктором ТРИК . Комплект довольно суровый, разработчики утверждают, что он хорош для быстрого прототипирования и для обучения, а именно (само-)обучение меня в данный момент и интересует.
Что сейчас широко доступно на рынке для робототехнических игр? Самодельное изготовление плат под каждый проект не рассматриваем. Лего, распи, ардуино. Лего прекрасен, но, к сожалению, очень и очень сильно ограничен. Распи и ардуины неплохо расширяются, но довольно неудобны и быстро превращаются в рассыпуху разных карточек-шильдиков-макеток. Вот тут и выходят на рынок питерские ребята со своим конструктором ТРИК.
Итак, моя задача понять, насколько это доступно широкой публике (мне). Я никогда не посещал лекций ни по теоретической кибернетике, ни по теории управления. Закон Ома я выучил ровно настолько, чтобы понять, что розетку лизать не стоит, и паяльник не является моим другом. Но как всякий нормальный (великовозрастный) ребёнок играть я люблю, и поэтому заинтересовался этой темой.
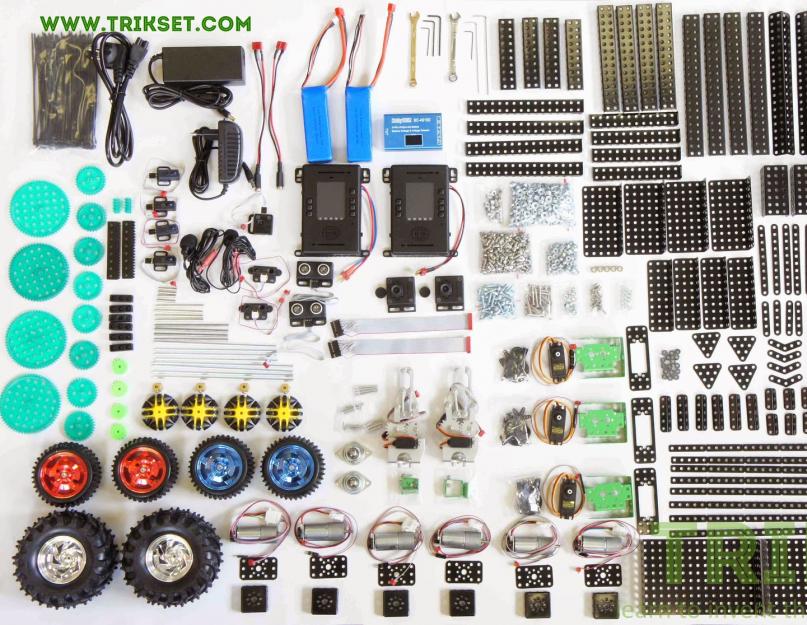
Я получил вот такой набор: 
Вообще цена их наборов варьируется от примерно двадцати до семидесяти тысяч рублей. Дороже ли это, чем лего? Нет. Месяц назад я купил Lego EV3. Цена вопроса 370€ базовый набор + 100€ аккумулятор (они там совсем офигели?!) И это ещё я не считал зарядника за тридцать евро. Плюс ко всему в базовый набор не входят ни сонар (+35€), ни гироскоп (+35€). А уж про камеру с микрофоном и вообще можно забыть, не упоминая вообще в принципе отустствия доступа внутрь леговского линукса.
В мой набор (он и разложен на предыдущей фотографии) входят два контроллера , две камеры, два микрофона, сонары, два типа инфракрасных датчиков, кнопки, шесть электродвигателей с оптоэнкодерами, три сервы, два механических захвата, куча колёс, в том числе голономных, зарядки-аккумуляторы-шнурки, зубчатые колёса, рейки и куча металлических пластин и уголков (привет детство!). Конструктор чисто для начала, вообще к контроллеру можно подключить практически всё, на что хватит воображения. Центральный процессор ARM9, под видео отдельный процессор, чтобы не грузить центральный. Программировать можно на чём угодно от ассемблера до C#, вам дают рутовую консоль, плюс весь код прошивки опенсорсный.
Вот так выглядит моя чудо-коробка:

В качестве самого первого проекта я решил собрать обратный маятник, он и представлен на заглавной картинке. Вот так он выглядит сзади:
Из набора мне понадобилось два двигателя, два колеса, чуть крепежа и непосредственно контроллер с батареей. Моей целью не было скопировать туториал из обучающего курса ТРИК, мне интересно обломать зубы обо все проблемы самостоятельно, поэтому я буду изобретать велосипед.
Итак, в моём распоряжении одна степень свободы, акселерометр и гироскоп, энкодеры от двигателей я не использовал. Писать буду на Qt Script.
Чтение датчиков
Изначально я хотел обойтись одним акселерометром. Типа, читаю знак проекции на ось Z, если он положительный, то кручу колёса в одну сторону, если отрицательный, то в другую. В теории всё хорошо, но сделав это, добился только дикого дрыганья моей тележки. Вздохнул и сел штудировать литературу, благо, что она оказалась не сильно долгой. Итак, меня интересует только угол отклонения тележки от вертикали.Гироскоп
Он же датчик угловых скоростей, выдаёт хороший плавный сигнал, но чтобы отследить с его помощью ориентацию в пространстве, скорости нужно интегрировать. Изначально скорости выдаются с погрешностью, интеграция вносит ещё ошибок, что в итоге приведёт к уплыванию показаний гироскопа. Поэтому только гироскопа нам для маятника недостаточно, нужно его комбинировать с акселерометром.Вот мой код работы с гироскопом, здесь while(true) - основной цикл программы.
var gyr_x_angle = 0;
var lasttime = Date.now();
while (true) {
var G = brick.gyroscope().read();
G = G + 69; // drift correction
var curtime = Date.now();
var dt = (curtime - lasttime)/1000.0;
lasttime = curtime;
gyr_x_rate = G * 0.07;
gyr_x_angle = gyr_x_angle + gyr_x_rate * dt;
}
В массив G я читаю значения датчика, в следующей строчке произвожу коррекцию интересующей меня оси. Выясняется, что мой конкретно датчик в полном покое показывает в среднем скорость в 69 единиц, поэтому я их вычитаю, чтобы получить интересующую меня скорость.
Датчик выдаёт целое число, которое нужно перевести в углы. В штатном режиме он работает на 2000 градусов/сек (dps). Даташит говорит, что этому соответствует константа в 70mdps/digit. Таким образом, G(digits) * 0.07 (dps/digit) даёт нам угловую скорость. Осталось её проинтегрировать, умножив на время измерения dt.
Акселерометр
Из акселерометра угол получить ещё проще, однако проблема в том, что уж больно он шумный, а уж когда тележка начинаёт дёргаться туда-сюда, вообще туши свет. Вот так выглядит код:[...] while (true) { [...] var A = brick.accelerometer().read(); var a_x_angle = Math.atan(A / A) * 180.0 / pi; }
Гасим шум: совмещение показаний акселерометра и гироскопа
[...] var CF_x_angle = 0; while (true) { [...] CF_x_angle = 0.98*(CF_x_angle+ gyr_x_rate*dt) + 0.02*a_x_angle; }Это просто говорит, что значение текущего угла это на 98% значение предыдущего угла с поправкой от гироскопа, а на 2% - это прямое чтение угла от акселерометра. Такое совмещение позволяет бороться с уплыванием гироскопа, обратите внимание, что переменную gyr_x_angle мы тут вообще не использовали.
ПИД-регулятор
Как я уже говорил, я не посещал умных лекций по теории управления, поэтому LQR-регуляторы мне не по зубам за разумное (пара часов) время. А вот ПИД вполне подойдёт.В предыдущем параграфе мы получили пристойную (я надеюсь) оценку угла отклонения тележки от вертикали. Улучшить её можно, используя фильтрацию Калмана, но это стрельба из пушки по воробьям. Теперь пришло время крутить колёса - чем больше угол отклонения, тем быстрее нужно крутить колесо.
Скорость вращения колеса, которую нам выдаст ПИД, состоит из трёх (взвешенных) слагаемых: пропорциональной, интегирующей и дифференцирующей. Пропорциональная просто равна углу отклонения от вертикали, интегрирующая - это сумма всех ошибок регулирования, а дифференцирующая пропорциональна скорости изменения отклонения от вертикали.
Звучит это страшно, а на деле код крайне простой:
полный код программы
var gyr_x_angle = 0;
var lasttime = Date.now();
var CF_x_angle = 0;
var iTerm = 0;
var CF_x_angle_prev = 0;
var KP = 0;
var KI = 0;
var KD = 0;
while (true) {
var G = brick.gyroscope().read();
G = G + 69; // drift correction
var curtime = Date.now();
var dt = (curtime - lasttime)/1000.0;
lasttime = curtime;
gyr_x_rate = G * 0.07;
var A = brick.accelerometer().read();
var a_x_angle = Math.atan(A / A) * 180.0 / pi;
CF_x_angle = 0.98*(CF_x_angle+ gyr_x_rate*dt) + 0.02*a_x_angle;
// крутим колёса!
var pTerm = KP*CF_x_angle; // пропорциональная составляющая
iTerm = iTerm + KI*CF_x_angle; // интегирующая составляющая
var dTerm = KD * (CF_x_angle - CF_x_angle_prev); // дифференциальная составляющая
CF_x_angle_prev = CF_x_angle;
power = pTerm + iTerm + dTerm;
brick.motor(M3).setPower(power);
brick.motor(M4).setPower(power);
}
Выбор констант KP, KI, KD
Осталась самая сложная часть: найти значения весов в сумме, к сожалению, это можно только делать эмпирически.Для начала найдём коэффициент KP. Положим KI и KD равными нулю и увеличиваем KP начиная с нуля до того момента, когда наша тележка начнёт совершать (примерно) постоянные колебания, примерно вот так (KP=8, KI=0, KD=0):
Очевидно, что это перебор, тележка получает слишком сильный сигнал от пропорциональной составляющей, поэтому уменьшим её примерно вполовину, получим вот это (KP=5, KI=0, KD=0):
Теперь тележке не хватает чисто пропорционального сигнала, увеличим её скорость, добавив интегрирующей компоненты. Плавно увеличиваем KI с нуля, пытаясь достигнуть момента, когда снова получим колебания тележки вокруг желаемого положения (KP=5, KI=0.5, KD=0):
Теперь добавляем дифференцирующую компоненту, которая будет играть роль демпфера, гася колебания, вот что у меня получается (KP=5, KI=0.5, KD=5):
Заключение
У меня довольно быстро (за один вечер) получилась самобалансирующаяся тележка. Учитывая, что программа у меня получилась аж в двадцать пять строк, то теперь на досуге осталось добавить управление тележкой, повороты и прохождение полосы препятствий, это не должно составить больших сложностей.Ни электротехнического, ни кибернетического бэкграунда у меня нет, то есть, это вполне доступно рядовым пользователям, что, собственно, мне и очень интересно. Буду продолжать изучение!
По сравнению с тем же леговским набором оно всё, конечно, выглядит несколько топорнее, китайские датчики (как и у лего), но не закатанные в толстенный качественный леговский пластик. Менее вылизанный софт, который находится в активной разработке. Существенно меньше сообщество людей, программирующих на этом контроллере, но учитывая, что проекту без году неделя, да ещё видя недавний успех ардуино, это меня мало пугает. Зато меня восхищает гибкость контроллера, которая получилась из потрясающго энтузиазма, с которым в Питере взялись за разработку.
Обновление: технические характеристики контроллера
Многие не понимают, чем отличается триковский контроллер от ардуино или от леговских коробок. Поэтому вот табличка:| Центральный процессор (ЦП) | OMAP-L138 C6-Integra™ DSP+ARM® SoC, Texas Instruments |
| Тактовая частота ЦП | 375 МГц |
| Процессорное ядро ЦП | ARM926EJ-S™ RISC MPU |
| DSP-ядро ЦП | C674x Fixed/Floating-Point VLIW DSP |
| Оперативная память | 256 МБайт |
| FLASH - память | 16 МБайт |
| Периферийный процессор (ПП) | MSP430F5510, Texas Instruments |
| Тактовая частота ПП | 24 МГц |
| Интерфейсы пользователя | USB 2.0, WiFi b/g/n, BlueTooth, 2*UART, 2*I2C, Micro-SD, Mic in (stereo), Line out (mono) |
| Интерфейсы двигателей постоянного тока | 4 порта двигателей 6-12V DC, с индивидуальной аппаратной защитой от перегрузки по току (до 2А на двигатель) |
| Интерфейсы периферийных устройств | 19 сигнальных портов общего назначения (6 одноканальных и 13 двухканальных) с питанием 3.3-5V, из них 6 могут работать в режиме аналогового входа |
| Интерфейсы видео сенсоров | 2 входа BT.656 VGA 640*480, поддержка режима стерео |
| Встроенный LCD монитор | 2.4” TFT, цветной, сенсорный, разрешение 320*240 пикселей |
| Встроенный динамик | Номинальная мощность 1W, пиковая 3W |
| Светодиодный индикатор | 2-цветный, программно-управляемый |
| Слоты расширения | 2 * 26-контактных «щелевых» разъема модулей расширения |
| Дополнительное оборудование (входит в состав контроллера) | 3-х осевой акселерометр, 3-х осевой гироскоп, аудиокодек, усилитель, конвертеры и схемы управления питанием, схемы защиты входов от перегрузок по напряжению и току |
| Электропитание | 6-12V DC, внешний сетевой адаптер либо LiPo аккумулятор RC 3P (11,1V) / 2P (7,4V) |
| Габариты корпуса | 125 * 80 * 25 мм |
Интерактивные роботы и специальные игрушки помогают с ранних лет развивать в ребенке скрытые навыки или тяготения к точным наукам. Конструкторы в данном аспекте весьма выгодны, поскольку содержат в своем комплекте различные модели для сборки, что также позволит удовлетворить интерес большинства детей. Образование происходит в комфортно и развлекательной обстановке, что также положительно влияет на последующее восприятие обучения. Кибернетический конструктор ТРИК максимально оптимизирован под запросы современного школьника, позволяя во время сборки и пользования познать основы робототехники, физики, динамики и т.д. Отзывы о подобных игрушках положительные, поскольку такие изделия помогают увлечь ребенка, дают какую-то образовательную базу и на примере показывают, как устроены некоторые механизмы.
Особенности кибернетического конструктора ТРИК
- Модель подходит как для развлечения, так и для комплексного образовательного процесса, в ходе которого ребенок обучается работать в команде, понимать инструкции и графические схемы;
- Конструктор помогает расширить творческое и пространственное мышление, логику и математические способности;
- Модель изготовлена из прочного и износоустойчивого металла;
- В комплект входят LED-лента, инфракрасные датчики, сервоприводы и специальные сенсоры, что позволит собрать уникальные модели киборгов, способных передвигаться, обходить препятствия, достигать поставленной цели и даже фиксировать изображение;
- Конструктор рассчитан для пользования двумя учениками.
Функциональные возможности кибернетического конструктора ТРИК
Помощь в развитии ребенка можно оказывать с ранних лет, применив при этом интерактивные игрушки. Модели полезны, поскольку помогают выявить расположенность детей к каким-либо точным наукам или расширить уже сложившийся кругозор. К числу «умных» девайсов относят кибернетический конструктор торговой марки ТРИК, который интересен своим дизайном и функциональностью. Изделие изготовлено из металла, что говорит о прочности и износоустойчивости модели. Конструктор помогает развить пространственное мышление, логику и фантазию.
В комплектацию к базовому набору металлического скелета входят специальные датчики, сенсоры и основные сервоприводы, что позволит собрать уникальных киборгов, умеющих летать, передвигаться по заданному маршруту и свободно обходить любые препятствия. Конструктор предполагает моделирование самолета, подъемника, строительного крана, квадрокоптера и других роботов. Это говорит о том, что набор однозначно понравится любому пользователю, поскольку удовлетворяет запросы в разных направлениях.
Структурные элементы изготовлены из металла толщиной 0,75мм, 0,8мм, 1,0мм, что свидетельствует о надежности и прочности собранных моделей. Для комплексного творческого процесса в комплект поставки входят адаптеры, участвующие в соединении типовых сервоприводов и моторов. Более того, пользователь сможет освоить особенности применения LED-ленты, камеры, инфракрасных сенсоров и других деталей. Важным дополнением служат датчики касания, расстояния и распознавания объектов. Для любителей техники и моделей, умеющих передвигаться, в комплект входят колеса различного диаметра, шестеренки, червячная пара, реечные передачи и омниколесо. Особенность конструктора в том, что все элементы совместимы с другими сериями металлических роботов, включая адаптеры для крепления токопроводящих приводов.

В комплект входит мощный аккумулятор (4200mAh) и специальное зарядное устройство, что свидетельствует о возможности сборки автономно работающих роботов. Отметим, что все токопроводящие элементы надежно скрыты от прямого воздействия на них. Конструктор рекомендован к применению детям в возрасте от 12 лет. Модель подходит для развлечения и обучения как мальчиков, так и девочек. Для комплексной сборки роботов требуется присутствие взрослых, если дети не попадают в возрастные рамки. Комплект содержит мелкие элементы.
Цена на кибернетический конструктор доступная, что позволит приобрести несколько модификаций товара. Данный набор подойдет для игр 1-2 детей одновременно. Важно отметить, что интерактивные девайсы могут использоваться с целью оптимальной подготовки детей к школьной программе. Кроме этого, модель будет интересна любителям робототехники.
Для кого следует купить кибернетический конструктор ТРИК
Образовательный набор интересен как для ценителей уникальных киборгов, так и для новичков в данной области. Комплект соединительных элементов может применяться с целью подготовки к школьной программе или в качестве базового наглядного примера на каких-либо занятиях. Экземпляр может занимать достойное место на полке ценителей конструктора и интерактивных игрушек. Набор также будет интересен детям дошкольного возраста или подросткам, принимающим участие в организованных соревнованиях по робототехнике. Металлический конструктор - прекрасное сопровождение любого образовательного процесса.
Что общего между женской грудью и игрушечной железной дорогой? Правильно, и то, и то предназначено для детей, а играют с ними папы. Несколько дней назад я обзавёлся роботехническим конструктором ТРИК . Комплект довольно суровый, разработчики утверждают, что он хорош для быстрого прототипирования и для обучения, а именно (само-)обучение меня в данный момент и интересует.
Что сейчас широко доступно на рынке для робототехнических игр? Самодельное изготовление плат под каждый проект не рассматриваем. Лего, распи, ардуино. Лего прекрасен, но, к сожалению, очень и очень сильно ограничен. Распи и ардуины неплохо расширяются, но довольно неудобны и быстро превращаются в рассыпуху разных карточек-шильдиков-макеток. Вот тут и выходят на рынок питерские ребята со своим конструктором ТРИК.
Итак, моя задача понять, насколько это доступно широкой публике (мне). Я никогда не посещал лекций ни по теоретической кибернетике, ни по теории управления. Закон Ома я выучил ровно настолько, чтобы понять, что розетку лизать не стоит, и паяльник не является моим другом. Но как всякий нормальный (великовозрастный) ребёнок играть я люблю, и поэтому заинтересовался этой темой.
Я получил вот такой набор:
Вообще цена их наборов варьируется от примерно двадцати до семидесяти тысяч рублей. Дороже ли это, чем лего? Нет. Месяц назад я купил Lego EV3. Цена вопроса 370€ базовый набор + 100€ аккумулятор (они там совсем офигели?!) И это ещё я не считал зарядника за тридцать евро. Плюс ко всему в базовый набор не входят ни сонар (+35€), ни гироскоп (+35€). А уж про камеру с микрофоном и вообще можно забыть, не упоминая вообще в принципе отустствия доступа внутрь леговского линукса.
В мой набор (он и разложен на предыдущей фотографии) входят два контроллера , две камеры, два микрофона, сонары, два типа инфракрасных датчиков, кнопки, шесть электродвигателей с оптоэнкодерами, три сервы, два механических захвата, куча колёс, в том числе голономных, зарядки-аккумуляторы-шнурки, зубчатые колёса, рейки и куча металлических пластин и уголков (привет детство!). Конструктор чисто для начала, вообще к контроллеру можно подключить практически всё, на что хватит воображения. Центральный процессор ARM9, под видео отдельный процессор, чтобы не грузить центральный. Программировать можно на чём угодно от ассемблера до C#, вам дают рутовую консоль, плюс весь код прошивки опенсорсный.
Вот так выглядит моя чудо-коробка:
В качестве самого первого проекта я решил собрать обратный маятник, он и представлен на заглавной картинке. Вот так он выглядит сзади:
Из набора мне понадобилось два двигателя, два колеса, чуть крепежа и непосредственно контроллер с батареей. Моей целью не было скопировать туториал из обучающего курса ТРИК, мне интересно обломать зубы обо все проблемы самостоятельно, поэтому я буду изобретать велосипед.
Итак, в моём распоряжении одна степень свободы, акселерометр и гироскоп, энкодеры от двигателей я не использовал. Писать буду на Qt Script.
Чтение датчиков
Изначально я хотел обойтись одним акселерометром. Типа, читаю знак проекции на ось Z, если он положительный, то кручу колёса в одну сторону, если отрицательный, то в другую. В теории всё хорошо, но сделав это, добился только дикого дрыганья моей тележки. Вздохнул и сел штудировать литературу, благо, что она оказалась не сильно долгой. Итак, меня интересует только угол отклонения тележки от вертикали.Гироскоп
Он же датчик угловых скоростей, выдаёт хороший плавный сигнал, но чтобы отследить с его помощью ориентацию в пространстве, скорости нужно интегрировать. Изначально скорости выдаются с погрешностью, интеграция вносит ещё ошибок, что в итоге приведёт к уплыванию показаний гироскопа. Поэтому только гироскопа нам для маятника недостаточно, нужно его комбинировать с акселерометром.Вот мой код работы с гироскопом, здесь while(true) - основной цикл программы.
var gyr_x_angle = 0;
var lasttime = Date.now();
while (true) {
var G = brick.gyroscope().read();
G = G + 69; // drift correction
var curtime = Date.now();
var dt = (curtime - lasttime)/1000.0;
lasttime = curtime;
gyr_x_rate = G * 0.07;
gyr_x_angle = gyr_x_angle + gyr_x_rate * dt;
}
В массив G я читаю значения датчика, в следующей строчке произвожу коррекцию интересующей меня оси. Выясняется, что мой конкретно датчик в полном покое показывает в среднем скорость в 69 единиц, поэтому я их вычитаю, чтобы получить интересующую меня скорость.
Датчик выдаёт целое число, которое нужно перевести в углы. В штатном режиме он работает на 2000 градусов/сек (dps). Даташит говорит, что этому соответствует константа в 70mdps/digit. Таким образом, G(digits) * 0.07 (dps/digit) даёт нам угловую скорость. Осталось её проинтегрировать, умножив на время измерения dt.
Акселерометр
Из акселерометра угол получить ещё проще, однако проблема в том, что уж больно он шумный, а уж когда тележка начинаёт дёргаться туда-сюда, вообще туши свет. Вот так выглядит код:[...] while (true) { [...] var A = brick.accelerometer().read(); var a_x_angle = Math.atan(A / A) * 180.0 / pi; }
Гасим шум: совмещение показаний акселерометра и гироскопа
[...] var CF_x_angle = 0; while (true) { [...] CF_x_angle = 0.98*(CF_x_angle+ gyr_x_rate*dt) + 0.02*a_x_angle; }Это просто говорит, что значение текущего угла это на 98% значение предыдущего угла с поправкой от гироскопа, а на 2% - это прямое чтение угла от акселерометра. Такое совмещение позволяет бороться с уплыванием гироскопа, обратите внимание, что переменную gyr_x_angle мы тут вообще не использовали.
ПИД-регулятор
Как я уже говорил, я не посещал умных лекций по теории управления, поэтому LQR-регуляторы мне не по зубам за разумное (пара часов) время. А вот ПИД вполне подойдёт.В предыдущем параграфе мы получили пристойную (я надеюсь) оценку угла отклонения тележки от вертикали. Улучшить её можно, используя фильтрацию Калмана, но это стрельба из пушки по воробьям. Теперь пришло время крутить колёса - чем больше угол отклонения, тем быстрее нужно крутить колесо.
Скорость вращения колеса, которую нам выдаст ПИД, состоит из трёх (взвешенных) слагаемых: пропорциональной, интегирующей и дифференцирующей. Пропорциональная просто равна углу отклонения от вертикали, интегрирующая - это сумма всех ошибок регулирования, а дифференцирующая пропорциональна скорости изменения отклонения от вертикали.
Звучит это страшно, а на деле код крайне простой:
полный код программы
var gyr_x_angle = 0;
var lasttime = Date.now();
var CF_x_angle = 0;
var iTerm = 0;
var CF_x_angle_prev = 0;
var KP = 0;
var KI = 0;
var KD = 0;
while (true) {
var G = brick.gyroscope().read();
G = G + 69; // drift correction
var curtime = Date.now();
var dt = (curtime - lasttime)/1000.0;
lasttime = curtime;
gyr_x_rate = G * 0.07;
var A = brick.accelerometer().read();
var a_x_angle = Math.atan(A / A) * 180.0 / pi;
CF_x_angle = 0.98*(CF_x_angle+ gyr_x_rate*dt) + 0.02*a_x_angle;
// крутим колёса!
var pTerm = KP*CF_x_angle; // пропорциональная составляющая
iTerm = iTerm + KI*CF_x_angle; // интегирующая составляющая
var dTerm = KD * (CF_x_angle - CF_x_angle_prev); // дифференциальная составляющая
CF_x_angle_prev = CF_x_angle;
power = pTerm + iTerm + dTerm;
brick.motor(M3).setPower(power);
brick.motor(M4).setPower(power);
}
Выбор констант KP, KI, KD
Осталась самая сложная часть: найти значения весов в сумме, к сожалению, это можно только делать эмпирически.Для начала найдём коэффициент KP. Положим KI и KD равными нулю и увеличиваем KP начиная с нуля до того момента, когда наша тележка начнёт совершать (примерно) постоянные колебания, примерно вот так (KP=8, KI=0, KD=0):
Очевидно, что это перебор, тележка получает слишком сильный сигнал от пропорциональной составляющей, поэтому уменьшим её примерно вполовину, получим вот это (KP=5, KI=0, KD=0):
Теперь тележке не хватает чисто пропорционального сигнала, увеличим её скорость, добавив интегрирующей компоненты. Плавно увеличиваем KI с нуля, пытаясь достигнуть момента, когда снова получим колебания тележки вокруг желаемого положения (KP=5, KI=0.5, KD=0):
Теперь добавляем дифференцирующую компоненту, которая будет играть роль демпфера, гася колебания, вот что у меня получается (KP=5, KI=0.5, KD=5):
Заключение
У меня довольно быстро (за один вечер) получилась самобалансирующаяся тележка. Учитывая, что программа у меня получилась аж в двадцать пять строк, то теперь на досуге осталось добавить управление тележкой, повороты и прохождение полосы препятствий, это не должно составить больших сложностей.Ни электротехнического, ни кибернетического бэкграунда у меня нет, то есть, это вполне доступно рядовым пользователям, что, собственно, мне и очень интересно. Буду продолжать изучение!
По сравнению с тем же леговским набором оно всё, конечно, выглядит несколько топорнее, китайские датчики (как и у лего), но не закатанные в толстенный качественный леговский пластик. Менее вылизанный софт, который находится в активной разработке. Существенно меньше сообщество людей, программирующих на этом контроллере, но учитывая, что проекту без году неделя, да ещё видя недавний успех ардуино, это меня мало пугает. Зато меня восхищает гибкость контроллера, которая получилась из потрясающго энтузиазма, с которым в Питере взялись за разработку.
Обновление: технические характеристики контроллера
Многие не понимают, чем отличается триковский контроллер от ардуино или от леговских коробок. Поэтому вот табличка:| Центральный процессор (ЦП) | OMAP-L138 C6-Integra™ DSP+ARM® SoC, Texas Instruments |
| Тактовая частота ЦП | 375 МГц |
| Процессорное ядро ЦП | ARM926EJ-S™ RISC MPU |
| DSP-ядро ЦП | C674x Fixed/Floating-Point VLIW DSP |
| Оперативная память | 256 МБайт |
| FLASH - память | 16 МБайт |
| Периферийный процессор (ПП) | MSP430F5510, Texas Instruments |
| Тактовая частота ПП | 24 МГц |
| Интерфейсы пользователя | USB 2.0, WiFi b/g/n, BlueTooth, 2*UART, 2*I2C, Micro-SD, Mic in (stereo), Line out (mono) |
| Интерфейсы двигателей постоянного тока | 4 порта двигателей 6-12V DC, с индивидуальной аппаратной защитой от перегрузки по току (до 2А на двигатель) |
| Интерфейсы периферийных устройств | 19 сигнальных портов общего назначения (6 одноканальных и 13 двухканальных) с питанием 3.3-5V, из них 6 могут работать в режиме аналогового входа |
| Интерфейсы видео сенсоров | 2 входа BT.656 VGA 640*480, поддержка режима стерео |
| Встроенный LCD монитор | 2.4” TFT, цветной, сенсорный, разрешение 320*240 пикселей |
| Встроенный динамик | Номинальная мощность 1W, пиковая 3W |
| Светодиодный индикатор | 2-цветный, программно-управляемый |
| Слоты расширения | 2 * 26-контактных «щелевых» разъема модулей расширения |
| Дополнительное оборудование (входит в состав контроллера) | 3-х осевой акселерометр, 3-х осевой гироскоп, аудиокодек, усилитель, конвертеры и схемы управления питанием, схемы защиты входов от перегрузок по напряжению и току |
| Электропитание | 6-12V DC, внешний сетевой адаптер либо LiPo аккумулятор RC 3P (11,1V) / 2P (7,4V) |
| Габариты корпуса | 125 * 80 * 25 мм |
Мы живём в век стремительного развития робототехники и уже сейчас можно найти в магазинах наборы для самостоятельной сборки и программирования роботов. В основном эти наборы ориентированы для обучения детей и студентов, но и для взрослых, интересующихся робототехникой, здесь открываются большие возможности для реализации своих идей. В статье я предлагаю краткую информацию о том, какие конструкторы для сборки программируемых роботов существуют в природе уже сегодня.
Сразу оговорюсь, что буду писать в статье только про конструкторы стоимостью не выше 100 тыс. рублей. Вот какие конструкторы попали в обзор:
Ну и конечно в конце статьи вас ждёт .
LEGO Education WeDo
(Цены обновлены 27.01.2016) Начнём, пожалуй, с самого известного датского брэнда - LEGO . Компания производит два типа конструкторов с возможностью программировать для образовательных целей для разных возрастов. Для детей возраста от 7 лет LEGO выпускает серию LEGO Education WeDo . Здесь вы можете купить стартовый набор «ПервоРобот » (арт. 9580) (около 9000 руб.) и ресурсный набор (арт. 9585) (около 4000 руб.), если деталей вам не хватило. Также дополнительно можно приобрести датчики движения и наклона, мультиплексоры, моторы и лампочки. Отдельно можно приобрести комплект учебных проектов на компакт диске (арт. 2009585) (примерно 5800 руб.).
Программное обеспечение LEGO Education WeDo (арт. 2000097) для программирования роботов этой линейки с комплектом заданий приобретается отдельно и стоит порядка 7000 руб. Программирование здесь визуальное. Вы просто соединяете друг с другом нужные блоки-действия и таким образом составляете программу.

Конечно, все изделия, созданные с помощью этого конструктора, сложно назвать роботами, скорее простыми механизмами, но поверьте, детям возраста 7-8 лет сложнее и не нужно. Также обратите внимание, что собранный механизм должен быть подключен к компьютеру через USB-кабель, чтобы он функционировал.
LEGO Education WeDo 2.0
(Описание добавлено 27.01.2016) Это вторая версия конструктора LEGO Education WeDo , которая была впервые представлена на выставке CES 2016 . Конструктор также адаптирован для детей в возрасте от 7 лет. Но, в отличие от первой версии, здесь уже можно собирать автономных роботов, ведь готовый робот работает на двух батарейках AAA, а взаимодействие с ПК происходит по Bluetooth.

Стартовый набор стоит от 14600 руб. (арт. 45300). Из него можно собрать следующие модели: Майло (научный вездеход), Тягач, Гоночная машина, Землетрясение, Лягушка, Цветок, Шлюз, Вертолёт и Мусоровоз. В комплект набора входит СмартХаб, средний мотор, датчик движения, датчик наклона и 280 разнообразных деталей. Если вам не хватает каких-либо электронных компонентов, вы можете докупить их отдельно. Дополнительно можно приобрести аккумулятор (арт. 45302), который обеспечит более продолжительное время работы (я нашел такой аккумулятор только в одном магазине за 6100 руб.). Ещё учтите, что адаптер для зарядки аккумулятора (ар. 45517) продаётся отдельно (адаптер используется такой же, как и для конструкторов LEGO MINDSTORMS Education EV3 и NXT, см. ниже).
Также вы можете приобрести комплект учебных материалов (арт. 2045300), с помощью которого вы можете реализовать 17 проектов по физике, биологии, географии, исследованию космоса и инженерному проектированию, работа над которыми в сумме может занять более 40 академических часов. Этот комплект я тоже нашёл только в одном магазине за 30000 руб.
Микрокомпьютера здесь как такового нет. Вместо него здесь есть СмартХаб, который играет роль связующего звена между ПК/планшетом и электроникой робота. Т.е. все программы, которые вы напишите, будут работать на ПК или планшете. У СмартХаба здесь всего два порта для подключения датчиков и моторов, один индикатор и всего одна кнопка - кнопка питания. Электроника и ПО первой и второй версий конструкторов несовместимы.
Из плюсов можно также заметить, что к одному ПК или планшету можно подключить до трёх СмартХабов одновременно. Это позволит воспользоваться сразу шестью портами, т.е. вы сможете собрать довольно сложное устройство, у которого может быть шесть моторов или шесть датчиков.
В стартовый набор уже включено бесплатное базовое ПО, в состав которого входят стартовые проекты. Русский язык есть. ПО работает на Windows (7, 8.1 и RT), MacOS, iPad, Android-планшетах и взаимодействует с микрокомпьютером через Bluetooth 4.0. Программирование здесь визуальное, аналогичное первой версии конструктора. Скачать ПО можно . Кроме того есть возможность программировать с помощью Scratch 2. А для особо желающих, есть SDK с открытым исходным кодом, позволяющий взаимодействовать со СмартХабом через Bluetooth.
LEGO Mindstorms Education EV3
(Цены обновлены 27.01.2016) Этот конструктор роботов подходит для детей от 10 лет, хотя и взрослые используют его достаточно активно. Начинающим можно купить стартовый образовательный набор (арт. 45544) примерно за 30000 руб. (см. картинку), из которого вы сможете собрать балансирующего робота, щенка, ступенехода, сортировщика деталей по цветам и многое другое, что вам подскажет фантазия. В стартовый набор входит 541 деталь LEGO Technic и два лотка для их хранения, микрокомпьютер EV3 (с поддержкой Wi-Fi и Bluetooth ), аккумулятор, три сервомотора (2 больших и один средний), ультразвуковой датчик, датчик цвета, гироскопический датчик и два датчика касания. В набор не входят программное обеспечение LEGO Mindstorms EV3 и зарядка для аккумулятора.

Отдельно хочу заметить, что EV3 – это уже третья версия конструктора. Предыдущие версии назывались NXT (вторая версия) и RCX (первая версия). Версия NXT до сих пор продаётся наравне с EV3 версией, но о старых версиях я не буду здесь писать.
Внутри микрокомпьютера EV3 прячется процессор ARM 9 с операционной системой Linux . Здесь есть 4 входных порта и 4 выходных. В вашем распоряжении 16 Мб флеш-памяти и 64 Мб RAM. Для расширения памяти есть слот для карт Mini SDHC объёмом до 32Гб. На блоке имеется шестикнопочный интерфейс с подсветкой тремя цветами и чёрно белый дисплей разрешением 178x128. Здесь же есть динамик. Микрокомпьютер поддерживает Wi-Fi (встроенного Wi-Fi нет, рекомендуется использовать адаптер NETGEAR WiFi dongle WNA1100 Wireless-N 150 ) и Bluetooth (Bluetooth встроенный) для взаимодействия с роботом. Питание происходит от шести пальчиковых батареек (размера AA) или от литиевого аккумулятора ёмкостью 2050 мАч. От аккумулятора робот проработает дольше, чем от батареек. Заряжается аккумулятор 3-4 часа.

При желании вы можете купить дополнительный ресурсный набор (арт. 45560) примерно за 9000 руб., в комплект которого входят 853 дополнительные детали LEGO Technic . С таким набором вы сможете собрать робота-слона (см. фото), танкобота, фабрику игрушек и многое другое.

Для любителей космоса есть ещё один дополнительный образовательный набор "Космические проекты " (арт. 45570) стоимостью примерно 14000 руб. Чтобы использовать этот набор вам понадобятся стартовый и ресурсный наборы, о которых написано выше. К этому набору дополнительно можно приобрести комплект заданий (арт. 2005574) стоимостью около 11000 руб., в который входят тематические и обучающие миссии, а также исследовательские проекты.
Кроме перечисленных здесь комплектов вы можете найти в продаже домашнюю версию набора LEGO Mindstorms EV3 (арт. 31313) примерно за 21000 руб. (см. картинку ниже). Из этого набора можно собрать 5 базовых роботов и 12 бонусных моделей. В этом наборе немного другой набор деталей и датчиков, в отличае от стартового образовательного набора LEGO Mindstorms Education EV3 . Здесь есть пульт управления, а вместо ультразвукового датчика - инфракрасный (который, кроме изменения расстояний, принимает сигнал от пульта) и отсутствует гироскоп. Будьте внимательны: в наборе отсуствует аккумулятор и вам придётся использовать 6 пальчиковых батареек (AA) или покупать аккумулятор отдельно, а он не дешёвый. Кстати, для пульта тоже понадобятся батарейки: 2 мизинчиковые батарейки (AAA).

Есть в продаже поля для соревнований роботов. Также вы всегда можете отдельно докупить микрокомпьютеры, аккумуляторы, ИК-датчик, ИК-маяк, ультразвуковой и гироскопический датчики, датчики цвета, касания, температуры и звука и сервомоторы. Кстати, датчики от старой версии конструктора NXT тоже подходят.
Каждый микрокомпьютер EV3 имеет четыре входных порта для датчиков и четыре выходных порта для сервомоторов, лампочек и пр. Если вам этого не хватает, вы можете соединить вместе («в гирлянду») до 4-х микрокомпьютеров с помощью дополнительных USB -кабелей. В этом случае управление ложится на плечи главного микрокомпьютера и вы получаете до 16-ти входных портов и до 16-ти – выходных.

Программируются роботы этой серии с помощью программного обеспечения LEGO Mindstorms EV3 . Для домашнего набора ПО скачивается бесплатно . Для образовательных наборов ПО стало бесплатным с 1 января 2016. Программирование здесь тоже визуальное блочное основанное на графическом языке программирования LabVIEW , который позволяет создавать как простые, так и сверхсложные программы. Можно создавать свои блоки с помощью инструмента MyBlocks . Максимальный размер программы – 16 блоков не считая блок начала программы и цикла. Работает ПО на Microsoft Windows или Apple Macintosh . Русский язык поддерживается.

Образовательная версия ПО LEGO Mindstorms EV3 , кроме программирования, позволяет собирать статистические данные с датчиков и записывать их в память микрокомпьютера или в реальном времени передавать их через USB кабель, Wi-Fi или Bluetooth . Собранные данные можно анализировать, строить по ним графики. Здесь есть мультимедийные уроки в помощь ученикам и преподавателям.
Если вас интересует альтернативная среда программирования, то кроме LEGO Mindstorms EV3 вы можете программировать с помощью сред разработки LabVIEW (требуется дополнительный модуль LabVIEW LEGOMINDSTORMS) и RobotC (язык программирования C , RobotC версии 4.x поддерживает серии EV3 и NXT ). Обе среды программирования платные. В RobotC вы даже сможете тестировать робота с вашей программой в виртуальном мире, см. картинку. Виртуальные миры можно скачать . Из бесплатных посмотрите ev3dev . Здесь есть официальная поддержка языков C++ , Lua , Node.js , Python и поддержка сторонними разработчиками языков Google Go , C и Clojure . А установив виртуальную Java-машину leJOS в микрокомпьютер EV3 вы сможете программировать на Java с помощью Eclipse или с помощью Scratch 2 (о том как настроить Scratch 2 читайте в статье «Программирование робота Lego Mindstorms EV3 с помощью Scratch 2.0 »). Для поклонников .NET есть проекты LEGO MINDSTORMS EV3 API и MonoBrick . А для поклонников Basic есть расширение для бесплатной среды разработки Small Basic .

А совсем продвинутые изобретатели могут приобрести датчики сторонних компаний, таких как HiTechnic , и Vernier . Например, вы можете дополнительно приобрести инфракрасный датчик для обнаружения людей и животных, компас, барометр, датчик силы, датчик обнаружения объектов на небольшом расстоянии, датчик угла (измеряет углы и скорость поворота) и другие. Компания HiTechnic предлагает датчики непосредственно адаптированные для EV3 и NXT и к каждому датчику можно скачать программные блоки для ПО LEGO Mindstorms EV3 . Компания Vernier предлагает приобрести адаптер , позволяющий использовать их датчики в конструкторе, и дополнительно предлагает скачать программный блок для ПО LEGO Mindstorms EV3 .
TETRIX

MATRIX

Robotis OLLO
(Цены обновлены 05.05.2015) Корейская компания Robotis , основанная в 1999 году, предлагает конструктор OLLO для самостоятельной сборки роботов. Этот конструктор продаётся в виде наборов, рассчитанных на разный возраст. Из набора Figure (7+) можно создавать фигурки животных, но здесь нет ни моторов, ни датчиков, ни контроллеров. Из наборов Action (8+) и Starter (8+) уже можно создавать подвижные непрограммируемые модели. Здесь есть моторчик, но также нет ни датчиков, ни контроллеров. А вот наборы Explorer (10+), Inventor (10+) и Bug (10+) уже позволят конструировать и программировать роботов. Для набора Explorer есть расширяющий набор Inventor Expansion Set (около 9000 руб.), который превращает набор Explorer в набор Inventor . Стоимость набора Explorer около 16000 руб., Inventor (в 2015 году пропал из розничной продажи), Bug – около 9000 руб.

Из набора Explorer вы сможете сделать 12 моделей, а из набора Inventor - 24 модели по инструкции, но ничего не мешает вам сконструировать свои собственные модели роботов. Максимальный набор Inventor содержит контроллер, два двигателя, два сервомотора, два ИК-датчика, ИК-приемопередатчик, тактильные датчики, светодиодный модуль. В контроллере есть четыре порта для подключения приводов, два многофункциональных порта для подключения датчиков, приводов и порт для дистанционного управления и загрузки программ.
Из набора Bug вы сможете собрать 4 робота-жука, которыми можно управлять с помощью контроллера, они смогут ходить по линии (карточки для создания маршрута в комплекте) и обнаруживать объекты. Здесь в комплекте нет адаптера USB Downloader LN-101 для подключения к компьютеру, а он нужен, если вы собираетесь программировать.

Программируются роботы Robotis OLLO , как и все другие роботы компании, с помощью фирменного программного обеспечения RoboPlus . Для программирования используется C -подобный язык. В состав ПО входят RoboPlus Task (редактор программ, см. картинку), RobotPlus Manager (настройка оборудования), RoboPlus Motion (программирование сложных движений робота), RoboPlus Terminal (терминал) и Dynamixel Wizard (настройка и калибровка сервоприводов).

После написания вашей программы её нужно загрузить в контроллер соединив его с компьютером (см. рисунок) и, после включения робота, ваша программа начнёт выполняться. Скачать программу можно , почитать инструкцию - . Продвинутые программисты могут написать свою собственную прошивку для роботов Robotis OLLO на Embedded C .

Для роботов компании Robotis можно также писать программы прямо на смартфоне или планшете под управлением Android 2.3 и выше с помощью приложения R+ m.Task .
Robotis Bioloid
(Цены обновлены 05.05.2015) С этой серией той же корейской компании Robotis с помощью наборов Premium Kit (около 98000 руб.) и GP (около 234 тыс. руб.) вы сможете собрать человекоподобных роботов. Также в серии есть и другие наборы: STEM Standard (10+) (стоит около 26000 руб.), STEM Expansion (10+) (дополняет набор STEM Standard , стоит около 21000 руб.), Beginner (стоит около 34000 руб.).
Из набора STEM Standard можно сделать 16 различных роботов по схемам, а с набором STEM Expansion можно сделать ещё 9 моделей. В наборе идёт также 48 заданий. Этот набор частично состоит из комплектующих серии Robotis OLLO , а частично – из комплектующих Robotis Bioloid . Т.е. с этим набором вы можете использовать уже имеющиеся у вас наборы обеих серий. Это единственный набор совместимый с сериями OLLO и Bioloid . В наборе микроконтроллер CM-530 , матрица ИК-датчиков (позволяют бежать роботу по линии), 3 ИК-датчика (обнаружение препятствий) и пульт управления RC-100A .

Набор Beginner позволит вам создать роботов 14-ти различных конструкций. В наборе микроконтроллер CM-5 , 4 сервомотора DYNAMIXEL AX-12A и сенсорный модуль AX-S1 .

С набором Premium Kit вы сможете собрать человекоподобного робота в одной из трёх модификациях или 26 простых роботов (см. картинку). Человекоподобный робот из этого набора обладает системой стабилизацией тела благодаря двухосному гироскопу, что позволяет ему ловко удерживаться на ногах при ходьбе.
В наборе контроллер CM-530 (32-битный ARM Cortex, 6 кнопок, микрофон, датчик температуры, датчик напряжения, 6 входных/выходных OLLO-совместимых портов, 5 коннекторов для сервомоторов AX/MX-Series DYNAMIXEL ), 18 сервомоторов, двухосный гироскоп, 2 ИК-датчика, пульт управления RC-100A .

(Описание добавлено 08.06.2015) Этот конструктор я решил добавить сюда, потому что из него, кроме человекоподобного робота можно собрать ещё порядка 26 различных моделей роботов и механизмов. – это детище корейской компании DST Robot (до марта 2015 года компания называлась Dongbu Robot ). Пластмассовые элементы конструктора могут быть одного из следующих цветов: зелёного (по умолчанию), красного, жёлтого или синего. Есть приятный бонус – детали можно распечатать на 3D-принтере. Страничка конструктора находится , а вся документация и 3D-модели . Стоимость в магазинах от 65000 руб.


В наборе микроконтроллер (ATmega128 MCU , в микроконтроллер встроены датчики звука и света), датчик расстояния, IR-пульт дистанционного управления и IR-приёмник для него. Гироскоп/акселерометр и Bluetooth-модель нужно покупать отдельно.
VEX EDR
Конструкторы серии VEX EDR или просто VEX производит компания VEX Robotics . Предназначены они для возраста от 10 лет. Серия подходит как для школ, институтов, так и для продвинутых роботостроителей. В этой серии вы найдёте как наборы, так и отдельно продающиеся запчасти, объекты и поля для соревнований. Программируемые наборы (с микроконтроллером в комплекте) делятся на стартовые (Programming Control Starter Kit и Dual Control Starter Kit ) и наборы для соревнований (Classroom and Competition Mechatronics Kit , Classroom and Competition Programming Kit и Classroom and Competition Super Kit ). Цены на наборы варьируются от 400 до 1000 долларов на сайте производителя . Из каждого наборы вы сможете собрать робота на колёсах с клешнёй, см. картинку. Остальные модели вы можете придумывать самостоятельно, полагаясь на свою фантазию.

Вообще в серии VEX EDR очень широкий перечень компонентов. Вы всегда сможете отдельно приобрести датчики для следования по линии, датчики обнаружения препятствий и измерения расстояния до препятствий, датчики света, оптические датчики положения осей (измерение углового перемещения, направления вращения оси, пройденного расстояния и пр.), потенциометры (определение местоположения и направления при вращении), гироскопы, датчики касания, ограничители движений, акселерометры (измерение ускорения), светодиодные фонарики. Из механики нужно обратить внимание на возможность приобретения шестерёнчатых коробок передач (в том числе и червячную), гусениц, Omni-колёс, колёса Илона.
Программируются роботы этой серии с помощью RobotC , easyC (программирование на языке C с помощью перетаскивания блоков, см. первую картинку снизу), Flowol (программирование с помощью блок-схем, см. вторую картинку снизу) или Modkit (визуальное программирование с помощью блоков). Все среды разработки платные.


VEX IQ
Эта серия тоже производится компанией VEX Robotics и она тоже позволяет создавать программируемых роботов, но рассчитана она на возраст от 8 лет. Стартовые наборы этой серии стоят около 250 долларов на сайте производителя. Всего в серии 3 основных набора (Starter Kit with Controller , Starter Kit with Sensors , Super Kit ), расширяющие наборы, объекты и поля для соревнований, а также комплектующие по отдельности. Все позиции хорошо описаны на сайте производителя . В наборы Starter Kit with Sensors и Super Kit входят датчик цвета, гироскоп и датчик расстояния. Управление с пульта возможно в наборах Starter Kit with Controller и Super Kit . Во все наборы входят датчики касания. Хочется отметить, что в соревновательных наборах вы получите кроме дополнительных деталей Omni-колёса и гусеницы. Микроконтроллер VEX IQ оборудован 12-ю универсальными портами для подключения датчиков и моторов.

Программируются роботы серии VEX IQ с помощью Modkit (визуальное программирование с помощью блоков, см. картинку), а также Flowol и RobotC .

Интересна также виртуальная среда проектирования конструкции вашего робота VEX Assembler (см. картинку). С помощью этого ПО вы сможете виртуально изготовить и опробовать вашу конструкцию ещё на этапе проектирования. В программу уже загружено более 110 деталей конструктора VEX IQ , объекты для соревнований и даже целиком робот Clawbot IQ (робот с клешнёй). Программа доступна для свободного скачивания (заполните форму справа и получите ссылку для скачивания по электронной почте).

VEX PRO
Под этой линейкой продуктов компания VEX Robotics предлагает комплектующие, как вы уже поняли из названия, для профессионалов. Здесь нет наборов. Всё продаётся поштучно или комплектами. Все комплектующие можно посмотреть .
Технолаб
(Цены обновлены 05.05.2015) Под этой торговой маркой скрываются всё те же наборы от компаний Robotis и VEX Robotics , о которых было написано выше. Наборы локализованы и собраны для желающих заниматься робототехникой в зависимости от возраста и степень подготовленности и называются модулями. Всего модулей семь. Это модули предварительного , начального , базового , базового соревновательного , профессионального , исследовательского и экспертного уровней. Подробности о комплектации по всем модулям представлены на сайте ООО «Экзамен-Технолаб» . Компания занимается поставкой модулей для образовательных учреждений, но при желании модули можно найти и в розничной продаже по цене от 65000 руб. за модуль предварительного уровня рассчитанного на возраст 5-8 лет до 398 тыс. руб. за модуль экспертного уровня (14+). Программирование роботов доступно во всех модулях кроме модуля предварительного уровня.

Arduino
Торговая марка Arduino – это инструменты для создания не только роботов, но и множества различных гаджетов. Для роботостроителей здесь есть микроконтроллеры, всевозможные датчики, двигатели, сервомоторы, платы расширений, LCD дисплеи, светодиоды. Но под этой торговой маркой не производятся элементы корпусов или каркасов для сборки роботов. Здесь также нет элементов для монтажа. Единственное исключение - (см. картинку).

Платформа Arduino поддерживается большим количеством сторонних производителей, поэтому найти комплектующие для сборки роботов можно. Также можно найти в продаже и Arduino -совместимые микроконтроллеры и наборы для самостоятельной сборки роботов основанных на этой платформе. Все предлагаемые изделия непосредственно от производителя можно посмотреть .
Программировать микроконтроллеры Arduino можно с помощью бесплатной среды разработки Arduino IDE с открытым исходным кодом (см. первую картинку снизу). Написана Arduino IDE на Java и работает на компьютерах под управлением Windows , Mac OS X и Linux . В Arduino IDE используется язык программирования Processing (язык основанный на Java ). Кроме того некоторые микроконтроллеры Arduino можно запрограммировать с помощью RobotC , Flowol , Minibloq (графический язык программирования, бесплатно, см. вторую картинку снизу), Ardublock (графический язык программирования, встраивается в Arduino IDE , есть перевод инструкции на русский язык, бесплатно), Physical Etoys (бесплатный графический язык программирования для Windows и Linux с открытыми исходниками, русификации нет) и Modkit .


Также для программирования некоторых контроллеров Arduino можно воспользоваться плагином Visual Micro (платный), который встраивается в Microsoft Visual Studio 2008-2013 или в Atmel Studio 6.1-6.2 .
#Структор
(Описание конструктора обновлено 12.09.2016) Компания «Амперка» предлагает собственное решение для сборки Arduino -совместимых роботов – это #-образные панели, рейки и крепления для плат, датчиков и моторов под названием #Структор . Детали изготавливаются фрезеровкой из листов белого вспененного ПВХ толщиной 5 мм. За счёт использования такого материала у вас есть возможность красить детали красками. Прочность элементов достаточная для того чтобы создавать конструкции небольшого размера. В то же время материал податливый и вы можете легко просверливать в деталях отверстия, вкручивать шурупы или менять геометрию деталей канцелярским ножом.

Все элементы легко соединяются друг с другом, а если для динамических конструкций вам не хватает прочности соединений, «Амперка» предлагает склеивать элементы друг с другом. Кроме того, для ещё большей прочности, вы можете использовать детали «совметалконструктора», ведь отверстия в панелях #Структора расположены с тем же шагом 10мм. К сожалению, в мягкости материала, из которого созданы детали конструктора, кроется и небольшой минус – детали недолговечны. Со временем материал в месте креплений деформируется, и детали держатся неплотно.
Стоит отдельно отметить, что чертежи для изготовления деталей находятся в открытом доступе, и вы можете самостоятельно изготавливать элементы конструктора.

Из наборов здесь есть только один: - набор для сборки корпуса двухколёсного робота. В этом наборе нет микроконтроллера и датчиков. Здесь есть только детали корпуса, два мотора с колёсами, опорныйе шарики, один сервопривод, включатель и батарейный отсек, см. картинку снизу. Чтобы робот начал двигаться и ориентироваться в пространстве, вам понадобится докупить к набору управляющую электронику.

А если вы хотите сконструировать что нибудь посложнее, то вы можете купить детали структора по отдельности. Все элементы продаются плашками стоимостью 290 рублей. На каждой из них может быть несколько крупных деталей или множество мелких. Все варианты плашек можно посмотреть на сайте магазина . Для соединения деталей можно купить нейлоновые винты, гайки и стойки . Подробности о конструкторе можно узнать .
Multiplo
(Описание конструктора добавлено 15.05.2015) Multiplo – это Arduino -совместимый конструктор созданный аргентинской компанией RobotGroup . Конструктор полностью открытый, т.е. доступны как исходники ПО, так и чертежи конструктивных элементов (детали можно распечатать на 3D-принтере или нарезать на лазерном станке с ЧПУ). Основные детали пластиковые, уголки и некоторые другие элементы - аллюминиевые, винты, гайки, шайбы и оси - металлические. Эта же компания разработала программу для графического программирования Minibloq , о которой уже было написано выше (один из директоров компании, Хулиан да Силва, является автором этой программы). Официальная страница конструктора , а все инструкции, чертежи и ПО можно скачать .

Конструктор представлен наборами Starter Kit (134 долл.), Building Kit (269.90 долл.) и Monster Kit (479,90 долл.). В наборе Starter Kit контроллер DuinoBot , батарейный отсек (для трёх батареек AA), два инфракрасных сенсора, два двигателя, пульт управления и приёмник сигнала от него, провода и механические детали для постройки простой тележки. В наборе есть отвёртка и ключи, так что дополнительный инструмент вам не понадобится. В наборе Building Kit дополнительно появляются ультразвуковой датчик, 2 сервомотора, 2 датчика света, 2 светодиодные лампочки, а также дополнительные детальки, в том числе и для сборки клешни.
Набор Monster Kit самый большой. В этом наборе целых два микроконтроллера (можно делать сразу двух роботов из одного набора), а также 4 обычных мотора, 6 сермоторов, батарейные отсеки, один ультразвуковой датчик, 4 инфракрасных датчика, два комплекта дистанционного управления (пульт и датчик для приёма сигнала от него), много механических деталей, в том числе и для сборки двух клешней.
Ещё в официальном магазине есть набор Mechanical Kit (159 долл.), содержащий только механические детали, без электронной части. Также можно приобрести по отдельности микроконтроллер DuinoBot с батарейным отсеком (по цене 59.90 долл.), различные датчики и механические детали. И можно бесплатно скачать файлы для печати полей для соревнований. Магазин Multiplo находится .
Поскольку конструктор Arduino-совместимый, то программировать можно с помощью аналогичных средств разработки: Arduino IDE , Minibloq , Ardublock , Physical Etoys и Modkit .
Makeblock
(Описание конструктора добавлено 03.06.2015) Плюсы этого китайского конструктора в том, что здесь используется электроника Arduino и все детали сделаны из прочного штампованного алюминия. Особенно интересны здесь балки, вдоль которых тянется паз с резьбовой перфорацией, в который вы можете вкручивать винты на любом расстоянии друг от друга (см. вторую картинку снизу) и рельсы (см. третью картинку снизу).



Новичкам здесь понравятся модули с унифицированными разъёмами с цветными метками, для удобного и понятного подключения электронных компонентов. Т.е. для правильного подключения нужно просто убедиться в совпадении цвета меток.

Количество как самодостаточных, так и ресурсных наборов в магазине на официальном сайте огромное. Отдельно здесь можно купить датчики, платы, конструктивные элементы и пр. Из тематических наборов хочется выделить наборы для сборки 3D-принтера (набор Makeblock Constructor I 3D Printer Kit , 699,99 долл.), плоттера (XY-Plotter Robot Kit v2.0 , 299,99 долл.), робота играющего на ксилофоне (набор Music Robot Kit , 199,99 долл.), конструктор для сборки робота-художника различных модификаций рисующего фломастерами или выжигающего лазером (набор mDrawBot with Bluetooth and Laser Kit – Blue , 349,99 долл.) и робот-тележка mBot с большим набором датчиков, шасси которого совместимы с деталями LEGO и Makeblock (Bluetooth -версия стоит 74,99 долл., Bluetooth и Wi-Fi версия – 79,99 долл.).
Про набор mDrawBot я хочу написать отдельно. Из него можно собрать одного из 4-х роботов-художников:
mScara – это роботизированная рука, рисующая ручкой или фломастером, а с дополнительным набором Laser Kit (в комплекте есть даже очки для защиты глаз), ручку можно заменить на лазер, который будет выжигать рисунок, например на фанере.

mSpider – паук-художник, который висит на двух верёвочках и рисует на вертикальных поверхностях.

mEggBot – робот, рисующий на яйцах или шариках для пинг-понга.

mCar – трёхколёсный робот-машинка, рисующий на листе бумаги, по которому он ездит.

Но и это ещё не всё. Специально для набора mDrawBot компания Makeblock разработала программу с помощью которой вы сможете импортировать векторный рисунок формата SVG , конвертировать BMP в SVG и масштабирование рисунка. При нанесении рисунка с помощью лазера поддерживаются разные оттенки.

Наборы-конструкторы общего назначения следующие: Starter Robot Kit (Bleutooth -версия стоит 149,99 долл., IR -версия - 119.99) и Ultimate Robot Kit (399,99 долл.). Есть аналогичные наборы без электроники.
Для дистанционного управления роботом есть бесплатное приложение для Android и iOS - Makeblock . Некоторые наборы комплектуются пультами дистанционного управления, например, IR -версия набора Starter Robot Kit .
Программируются роботы Makeblock с помощью программы собственной разработки mBlock , основанной на редакторе Scratch 2.0 , с помощью Arduino IDE или ArduBlock . Чтобы работать в Arduino IDE или ArduBlock необходимо дополнительно установить библиотеку Makeblock . Примеры, инструкции, драйверы и ПО можно найти .
HUNA-MRT
(Цены обновлены 05.05.2015) Под корейским брендом «HUNA-MRT » скрываются наборы для конструирования механизмов и роботов. Наборы FUN&BOT (MyRobotTime ) и KICKY (MRT2 ) – это наборы для начинающих (на возраст 6-8 лет) из пластмассовых деталей и здесь нет программирования. А вот в наборах серий CLASS (MRT3 ) (на возраст 7-11 лет) и TOP (на возраст 9-11 лет) уже есть программируемая плата и есть возможность программировать роботов с помощью простой графической среды программирования. Отличие двух последних серий в том, что в серии CLASS (MRT3 ) детали пластмассовые, а в серии TOP – металлические. Во всём остальном – это полностью совместимые наборы. Детали из одной серии можно использовать вместе с деталями других серий этого брэнда. Есть также более продвинутый набор HUNITRONIC (для возраста 12-18 лет), который укомплектован аналогом микроконтроллера Arduino UNO и платой Extension IO Shield , для подключения датчиков. Все наборы комплектуются графической средой программирования. Получить больше информации по конструкторам можно на сайте ООО «Брейн Девелопмент» . Официальная страничка серии MRT3 .

Цены на программируемые наборы в магазинах начинаются от 15000 руб. (за Huna MRT3 1+2 ) до 36000 руб. (за TOP FULL KIT 2 ). Набор HUNITRONIC мне найти в продаже не удалось.
RoboRobo
Корейская компания RoboRobo предлагает 5 образовательных наборов для сборки программируемых роботов. Они так прямо и нумеруются Robo Kit №1 , Robo Kit №2 , Robo Kit №3 , Robo Kit №4 , Robo Kit №5 . Различаются они количеством деталей, количеством возможных модификаций роботов, которые вы сможете из них собрать по инструкциям, и сложностью. Чем больше цифра, тем больше деталей и тем сложнее. Обязательно обратите внимание, что набор 2 содержит в себе набор 1, набор номер 3 - содержит набор 2 и так далее. Поэтому если у вас уже есть набор Robo Kit №1 , то вы можете расширить его с помощью набора Robo kit №1-2 до набора Robo Kit №2 и тем самым сэкономить. Всего расширяющих наборов 4: Robo kit №1-2 , Robo kit №2-3 , Robo kit №3-4 и Robo kit №4-5 . Официальная страничка конструктора .

В максимальном наборе вы найдёте ИК-сенсор, ИК-пульт управления, датчик звука, датчики касания.
Программируются роботы этой компании с помощью графического интерфейса в программе Rogic Program (см. картинку).

Ещё компания RoboRobo предлагает наборы для очень маленьких детей (5-7 лет): Robo Kids №1 и Robo Kids №2 . Второй набор – дополнительный к первому. Из первого набора можно собрать 16 роботов, а из второго – ещё 16. В этих наборах производитель предлагает интересный подход к управлению роботами. В распоряжении маленьких программистов есть набор карточек, которые проводятся через сканер (см. картинку), который в свою очередь, даёт команды роботу.

fischertechnik
(Цены с сайта дилера обновлены 05.05.2015) Конструкторы fischertechnik выпускает немецкая фирма. Детали конструктора пластмассовые. Разные наборы конструктора рассчитаны на разный возраст. Наборы серии JUNIOR (5+) не имеют ни моторов, ни батареек, это просто конструкторы для малышей. С наборами серии BASIC (7+) и ADVANCED (7+), PROFI (8+) вы можете собирать различные машины и механизмы, они уже могут комплектоваться моторами, солнечными батареями, блоками питания и др. А вот сборка роботов и их программирование начинается в наборах серии ROBOTICS (8+).
В серии ROBOTICS шесть наборов: ROBOTICS LT Beginner Set (ROBOTICS LT Стартовый набор ) (стартовый набор для создания 8-ми автоматических устройств стоимостью 11130 руб.), ROBOTICS TXT Discovery Set (ROBOTICS TXT Набор первооткрывателя ) (для создания 11-ти механизмов и автономных роботов стоимостью 28500 руб.), ROBO TX Automation Robots (ROBO TX Автоматические роботы ) (для создания реалистичных промышленных роботов стоимостью 15300 руб.), ROBO TX ElectroPneumatic (ROBO TX ЭлектроПневматика ) (для сборки 4 пневматических конструкций стоимостью 13150 руб.), ROBO TX Explorer (ROBO TX Исследователь ) (для создания робота на гусеничном ходу в шести модификациях стоимостью 13150 руб.) и ROBO TX Training Lab (ROBO TX Учебная лаборатория ) (для конструирования автоматических устройств и мобильных роботов стоимостью 25500 руб.). Отдельно к наборам можно приобрести аккумуляторный набор, набор для дистанционного управления, набор свет и звук (для создания светозвуковых эффектов), наборы с дополнительными моторами, ресурсный набор и ящики для хранения. При совмещении наборов друг с другом вы сможете значительно расширить возможности в создании роботов.

Часть наборов серии ROBOTICS комплектуются контроллером ROBO TX (кроме стартового набора, который комплектуется контроллером ROBO LT), часть – контроллером ROBOTICS TXT . Из датчиков в наборах попадаются следующие: фотодатчик, датчик температуры, датчик цвета, ультразвуковой датчик расстояния, ИК-датчик следования по линии.
Характеристики контроллера ROBO TX следующие: 32-битный процессор ARM9 , монохромный дисплей разрешением 128х64, объём памяти 8 MB RAM, 2 MB Flash. Размер контроллера – 90 х 90 х 15 мм, вес - 90 г. Здесь 4 выхода для подключения моторов, 8 универсальных входов, 2 разъёма расширений I2C, RS485 для объединения с другими контроллерами, 4 входа и USB для подключения к компьютеру. Также здесь присутствует встроенный Bluetooth . Можно приобрести дополнительный микроконтроллер ROBO TX за 15300 руб.

Отдельно можно приобрести более продвинутый контроллер ROBOTICS TXT за 20250 руб. Вот его характеристики: ОС Linux , два процессора ARM Cortex A8 (32bit/600MHz) + Cortex M3 , память 128 Мб DDR3 RAM, 64 Мб Flash, слот для карт Micro SD , цветной сенсорный дисплей 2.4" разрешением 320 x 240, 8 универсальных входа, 4 высокоскоростных цифровых входа, 4 выхода на моторы, комбинированный модуль Bluetooth /Wi-Fi , ИК-приёмник (для приёма сигнала от пульта), USB 2.0 для подключения к ПК, USB Host (USB A для подключения USB-камеры fischertechnik или USB-свистков), 10 контактный разъём для входа или выхода по I2C интерфейсу, встроенный динамик, встроенные часы с собственной батарейкой. Размер контроллера – 90 x 90 x 25 мм. Контроллеры могут быть спарены. Все подробности о микроконтроллере .

Во все наборы входит ПО для программирования ROBO Pro (см. картинку) (в стартовом наборе вы найдёте облегчённую версию этого ПО). Свежую версию ПО и русификацию всегда можно скачать на сайте производителя .

Контроллер ROBOTICS TXT программируется с помощью ROBO Pro , C-Compiler , PC-Library , MS-RDS . C-Compiler можно скачать на той же странице, что и ROBO Pro .
Engino Robotics Platform
(Описание конструктора добавлено 01.05.2015) Engino Robotics Platform (ERP ) – это разработка кипрской фирмы Engino . Сейчас эта робототехническая платформа представлено только одним набором , из которого вы сможете собрать 6 моделей. Стоимость набора в рознице – около 17000 руб. Набор рассчитан на учеников школы (7+) и студентов.

В наборе микрокомпьютер, программное обеспечение (для частного и образовательного использования), провода, 3 мотора, 3 светодиода, 2 инфракрасных датчика, 1 датчик касания и разнообразные детали.
А вот спецификация микрокомпьютера ERP:
- 32-битный микроконтроллер ARM CORTEX-M2.
- 256 КБ FLASH, 64 КБ RAM.
- USB-порт 12 Mbit/s.
- 3 порта для моторов и 4 - для датчиков (светодиоды можно подключать к любым портам).
- Встроенный зуммер.
- Питание от 6-ти батареек AA.
- Встроенный Wi-Fi модуль.
Программировать собранные модели можно непосредственно на самом блоке или с помощью программного обеспечения ENGINO ERP . Дистанционно управлять роботами возможно с помощью приложения Engino ERP Remote Control , которое доступно в Google Play и Apple store .

Все подробности о конструкторе можно найти .
ТРИК
(Описание конструктора добавлено 01.05.2015) Кибернетический конструктор ТРИК – это российский конструктор, металлические детали которого совместимы с "совметалконструктором" (та же перфорация M4 c шагом 10мм). Возраст - 12+. Конструктор только появился, но я уже нашёл его в одном магазине. Цены примерно следующего порядка: стартовый набор - 25000 руб., образовательный – 35000 руб., школьный – 45000, соревновательный – 58000 руб. Разница между наборами в количестве датчиков и деталей, но в каждом наборе есть контроллер ТРИК , видеокамера и микрофон. Все наборы (кроме стартового) комплектуются пластиковой коробкой с отделениями для хранения деталей. В максимальном наборе имеются следующие датчики: 2 датчика освещённости, 2 датчика расстояния, 2 датчика касания. Кроме того здесь есть омни-колёса, светодиодные ленты, аккумуляторы, зарядное устройство.

Вот технические характеристики контроллера ТРИК:
- Операционная система: Linux.
- Центральный процессор: OMAP-L138 C6-Integra™ DSP+ARM® SoC, 375 МГц, Texas Instruments.
- Ядро центрального процессора: ARM926EJ-S™ RISC MPU.
- Оперативная память: 256 Мбайт, 6 Мбайт FLASH.
- Периферийный процессор: MSP430F5510, 24 МГц, Texas Instruments.
- Интерфейсы пользователя: USB 2.0, WiFi b/g/n, BlueTooth, 2xUART, 2xI2C, Micro-SD, Mic in (stereo), Line out (mono).
- Интерфейсы двигателей постоянного тока: 4 порта двигателей 6-12V DC, с индивидуальной аппаратной защитой от перегрузки по току (до 2А на двигатель).
- Интерфейсы периферийных устройств: 19 сигнальных портов общего назначения (6 одноканальных и 13 двухканальных) с питанием 3.3-5V, из них 6 могут работать в режиме аналогового входа.
- Интерфейсы видео сенсоров: 2 входа BT.656 VGA 640*480, поддержка режима стерео.
- Встроенный цветной сенсорный LCD монитор 2.4” TFT разрешением 320x240 пикселей.
- Встроенный динамик номинальной мощностью 1W, пиковой 3W.
- 2-цветный, программно-управляемый светодиодный индикатор.
- Слоты расширения: два 26-контактных «щелевых» разъема модулей расширения.
- Дополнительное оборудование (входит в состав контроллера): 3-х осевой акселерометр, 3-х осевой гироскоп, аудиокодек, усилитель, конвертеры и схемы управления питанием, схемы защиты входов от перегрузок по напряжению и току.
- Электропитание 6-12V DC, внешний сетевой адаптер либо LiPo аккумулятор RC 3P (11,1V) / 2P (7,4V).

Программирование возможно на С , С++/Qt , JavaScript , С#/F# (.NET) , Python и Java. Есть также собственная среда разработки - которая работает на Windows и Linux, см. картинку.

Для дистанционного управления разработано приложение для Android . Подключение к контроллеру происходит через Wi-Fi .

Подробности о конструкторе на официальном сайте .
MOSS
(Описание конструктора добавлено 02.06.2015) Конструктор MOSS , созданный американской компанией Modular Robotics , на мой взгляд, самый необычный конструктор из всех здесь перечисленных. Здесь нет ни проводов и ни привычных способов соединения деталей. Весь конструктор состоит из модулей кубической формы с гранями разных цветов и различных соединительных элементов, таких как, скобы и уголки. Все они крепятся друг к другу с помощью шариков-магнитов, которые позволяют создавать жёсткие или шарнирные соединения.

Разные цвета граней модулей сделаны не только для красоты, они ещё обозначают характеристики. Зелёные грани проводят электричество. У модуля аккумулятора все грани зелёные и основная цель этого модуля – поставлять энергию всем остальным модулям. Например, чтобы запитать модуль с мотором, вы должны соединить одну из его зелёных граней с зелёной гранью аккумулятора. Красные и коричневые грани проводят данные: красный – выход данных, коричневый – вход данных. Например, если вы хотите, чтобы датчик расстояния управлял скоростью вращения мотора вам нужно соединить красную грань модуля датчика расстояния с коричневой гранью модуля мотора. Голубые грани – передающие, через них передаётся энергия и/или данные. Например, если вам нужно запитать какой либо модуль, который находится на расстоянии от батареи, вы можете использовать голубые грани гибкого модуля или несколько простых модулей.


Что касается аудитории, на которую рассчитан конструктор MOSS , то разработчики уверяют, что он подойдёт как детям в возрасте от 8-х лет, так и взрослым. Есть ещё наборы Cubelets для детей в возрасте от 4-х лет, в которых нет шариков.
К сожалению, конструктор не продаётся в России и нельзя заказать доставку в Россию при заказе на официальном сайте конструктора .
Robo Wunderkind
(Описание конструктора добавлено 05.10.2015) А вот ещё один кубический конструктор совместимый с конструктором LEGO . Конструктор Robo Wunderkind так же как и конструктор MOSS состоит из модулей в форме куба, за исключением микроконтроллера, который состоит как бы из сдвоенных кубиков (на фото микроконтроллер оранжевого цвета). Модули соединяются друг с другом без проводов с помощью специальных соединительных элементов.

Сейчас на сервисе Kickstarter вы можете предзаказать следующие варианты наборов: стартовый (STARTER KIT , за 149 долларов), расширенный (ADVANCED KIT , за 249 долларов) и профессиональный (PROFESSIONAL KIT , за 499 долларов). Первые поставки начнутся в июле 2016 года. Наборы рассчитаны на детей от 5 лет и взрослых. В стартовом наборе есть системный модуль (микроконтроллер), модуль с датчиком расстояния (красного цвета), модуль Bluetooth (голубого цвета), аккумуляторный модуль (зелёного цвета), модуль-сервомотор (жёлтого цвета), пустой модуль, 2 модуля-мотора (синего цвета), 2 колеса, 7 соединительных элементов, 2 адаптера LEGO (для присоединения стандартных деталей LEGO, например, человечков, как показано на картинке) и одно пассивное колёсико. В расширенном наборе добавляется ещё 2 пустых модуля, модуль с LED-дисплеем, модуль с датчиком света, модуль с метеодатчиком, ещё 6 соединительных элементов и ещё 2 адаптера LEGO. В профессиональном наборе , по сравнению к расширенному, добавляется ещё 1 аккумуляторный модуль, ещё один модуль-сервомотор, ещё 3 пустых модуля, модуль с инфракрасным датчиком, модуль с лазерной указкой, модуль с экраном на основе электронных чернил, модуль с камерой, модуль с акселерометром, ещё 9 соединительных элементов, ещё 4 адаптера LEGO, и ещё одно пассивное колёсико.
А вот характеристики конструктора: процессор Allwinner A13 SoC, оперативная память RAM 256 Мб DDR3, Storage eMMC Flash Memory 4 GB, WiFi 802.11 b/g/n, Bluetooth 2.1/3.0/4.0. В системный модуль встроены микрофон и динамик.
Программировать готового робота можно с помощью специального приложения, доступного для iOS и Android . В планах разработчиков есть создание приложения для Windows , правда только к сентябрю 2016 года. Программирование здесь графическое. Кроме того поддерживается Scratch . Также создатели конструктора предоставляют API для разработки, как они пишут, на любом языке программирования.

Какой конструктор программируемых роботов покупать?
Итак, попробуем подвести итог всей полученной информации. Для поверхностного изучения робототехники подойдёт любой из стартовых наборов перечисленных конструкторов. Но, если вы планируете заниматься робототехникой серьёзно, то стоит посмотреть чуть глубже. Нужно оценить возможности каждого конструктора (виды датчиков, мощность и функциональность микроконтроллеров, наличие тех или иных частей для создания корпусов и др.).
Хорошей базой всевозможных датчиков обладает конструктор LEGO , но у микроконтроллера LEGO мало портов (всего 4 на вход и 4 на выход). Можно конечно соединять микроконтроллеры вместе, но тогда встаёт вопрос, куда девать такое количество контроллеров в автономных моделях (несколько контроллеров – это довольно объёмно). Также нужно отметить возможность создания роботов на основе LEGO из металла с помощью наборов TETRIX и MATRIX . Кроме того у LEGO большая армия поклонников, в том числе и в России.
Также хорошими возможностями обладают конструкторы от компании VEX Robotics . Здесь большой выбор датчиков, элементов конструкций и ПО для программирования роботов.
Если вы не собираетесь разрабатывать свою собственную конструкцию робота и вам не жалко денег, то обратите внимание на набор Premium Kit конструктора Robotis Bioloid . С этим набором вы можете собрать человекоподобного робота и запрограммировать его на свой вкус. Но стоит обратить внимание, что разновидность датчиков мала.
Если выбирать конструктор по контроллерам, то наиболее продвинутым выглядит конструктор fischertechnik . Здесь самый мощный контроллер с самым большим количеством портов, с возможностью подключения камеры и со встроенными Wi-Fi и Bluetooth модулями.
Если же вы хотите практически безграничных возможностей, то вам нужно обратить внимание на торговую марку Arduino . Здесь всё по-взрослому: много сред разработки, много совместимых аналогов, но нужно самостоятельно придумывать конструкции ваших роботов. Не удивительно, что с использованием этой платформы часто делают роботов из фанеры или картона или печатают детали на 3D принтере. Не забывайте также про Arduino-совместимые конструкторы, например, Multiplo и Makeblock .
Отечественный конструктор ТРИК также даёт большие возможности для творчества, т.к. здесь в комплекте есть камера, микрофон, акселерометр. Здесь также, как в конструкторе fischertechnik есть цветной сенсорный экран. К тому же за основу взят крепкий металлический конструктор.
А если вы присматриваетесь к конструкторам без проводов, то обратите внимание на конструкторы MOSS и Robo Wunderkind .
Несмотря на выявленные сильные стороны перечисленных выше наборов, все наборы хороши. И, конечно, вам самим нужно будет выбирать конструктор по своим собственным предпочтениям. Но в любом случае, покупая один из перечисленных в статье наборов, вы автоматически вступаете в мир робототехники.
В феврале были объявлены результаты конкурса инновационных образовательных программ среди школ Санкт-Петербурга. Одним из победителей стал Лицей № 419 с проектом «Инженерная МетаЛаборатория». На его реализацию будет выделено 2 млн. рублей. В этой новости нас в первую очередь привлекла технологическая база проекта — конструктор ТРИК. Обсуждаем суть проекта и роль ТРИКа в нем с Михаилом Киселевым – педагогом лицея и одним из авторов программы.

Динара Гагарина: Михаил Михайлович, во-первых, поздравляю с победой в конкурсе, это оказалось для вас неожиданным? Или вы были уверены в победе?
Михаил Киселев: Действительно, победа оказалась неожиданной. Мы не знали, какие образовательные учреждения еще участвуют в конкурсе кроме нас, тем более не знали, какие проекты ими заявлены. Надеюсь, что комитет по образованию их опубликует. Я очень благодарен моим коллегам, без которых разработка и реализация проекта были бы невозможны.
Можете в двух предложениях описать суть проекта? Самое-самое главное, что позволит выйти на новый уровень?
Сегодня многие говорят о необходимости инженерного образования, о связи робототехники со многими школьными дисциплинами. В реалиях же существуют разрозненные программы, решающие свои собственные задачи, не принимая во внимание, что конечная цель одна и та же. Мы попытались создать такие условия, чтобы предметы Информатика , Технология , Физика , Химия , Программирование , Проектная деятельность действительно имели общие точки пересечения, а дополнительное образование и внеурочная деятельность дополняли урочную деятельность. Мне кажется, у нас получилось.
Провокационный вопрос. Школе нужны инновации? Или все новое – хорошо забытое (или хорошо реализованное) старое?
Использование инноваций стимулирует получение новых знаний, правда не надо забывать, что все новое должно ложиться на прочный базовый фундамент. В хорошо забытом старом тоже можно найти много интересного, например, для своих занятий в кружке я очень внимательно изучил подшивки журналов, таких, как «Техника молодежи», с 30-х годов, многие идеи актуальны и сегодня, особенно, если добавить современную электронику.

Теперь давайте разбираться в деталях «Инженерной МетаЛаборатории». Если я правильно поняла, одна из составляющих – включение робототехники со второго класса через уроки информатики и технологии?
Инженерная МетаЛаборатория (ИМЛ) — проект не совсем робототехнический. Контроллеры, датчики, алгоритмы управления используются в нем как инструмент для реализации конечного продукта (проекта). Это своеобразный ресурсный центр, где по аналогии с ресурсными центрами Санкт-Петербургского университета собрана материально-техническая база и методические разработки для использования в учебном процессе по многим предметам и внеурочной деятельности.
Можете привести примеры таких разработок?
Один из проектов — «Палеонтологический туризм». Сначала дети изучают жизнь вымерших животных и растений, затем едут на карьер, находящийся недалеко от нашего лицея, находят там окаменелости, которые препарируются в лаборатории ручным инструментом, далее идет подготовка презентации или выставки.

Еще пример — проект «Выбираем наушники». Теоретическую часть учащиеся готовят с учителями-предметниками, а работа со звуком и обработка данных ведется в лаборатории. Обучение детей работе со сложными механизмами и устройствами — одна из задач ИМЛ.
Следующий пример — разработка олимпиадных задач по программированию (C, C++, Pascal, Java, C#), в которой могут участвовать школьники, даже не знакомые с основами робототехники, а проверка заданий осуществляется на реальных роботах.
Контроллеры и датчики тоже требуют изучения. Нами были разработаны стенды: электротехнический, пожарной и охранной сигнализации, медицинский, гидро- и аэропоники, отопительных систем. Основная особенность стендов — это то, что они собираются только из тех составных частей и материалов, которые используются в повседневной жизни (электрореле, розетки, помпы, бойлеры и др.). Девиз лаборатории: «Изучение — Управление — Совершенствование». На этапе сборки стенда дети знакомятся с устройством и свойствами элементов, которые их окружают. Следующий шаг — управление. Оказывается, используя контроллер ТРИК, можно этими элементами управлять. Поэтому для моих учеников не секрет, что такое «умный дом» или «интернет вещей». Совершенствование же — самостоятельный творческий процесс.
Инженерное наполнение проектной деятельности в рамках предмета Технология мотивирует учеников на самостоятельные исследования, поскольку нет ограничений в работе как по тематике проектов, так и с используемыми материалами. Надо отметить, что такое содержание предмета Технология полностью соответствует требованиям образовательных стандартов, что для нас очень важно, поскольку лицей №419 является городской экспериментальной площадкой по внедрению ФГОС ООО*.

Программная среда TRIK Studio очень удачно вписывается в программы Информатики и Программирования . Разработанные лабораторные работы можно использовать на предметах Физика , Химия , Биология . Не добрались пока только до Литературы и Русского языка , но это вопрос времени.
Спортивная робототехника в полном объеме присутствует в дополнительном образовании как соревновательная, так и творческая.
Вот, как-то так, очень хотелось объяснить, что ИМЛ — это не помещение, насыщенное оборудованием, а цельная структура, включающая педагогов, учеников, родителей, подкрепленная нормативными документами и обеспеченная материально.
Проекту еще предстоит пройти этапы внедрения и апробации, доработать УМК.
На мой взгляд наши разработки заслуживают того, чтобы о них узнало образовательное сообщество.
А сейчас в программе вашего лицея есть робототехника? В каком объеме и статусе?
Да, конечно, два раза в неделю работает кружок «Конструирование и программирование механизмов и роботов». Изучение элементов робототехники включено в программы предметов Информатика (16 часов) и Технология (32 часа), и, конечно же, в проектах на урочной и внеурочной деятельности очень часто используются технические возможности робототехники.

Что еще кроме ТРИКа вы планируете использовать? Поясню свой вопрос. Вы начинаете внедрять ТРИК во втором классе (кстати, не слишком ли рано в этом возрасте?), наверное, через определенное время конструктор детям надоест и захочется чего-то нового. Как планируете решать эту проблему?
Многие преподаватели в своей деятельности используют только те наборы, которые были закуплены, даже на соревнованиях различного уровня существует понятие образовательный конструктор и ограничение на использование контроллеров, отличных от рекомендуемых спонсорами соревнований. По моему мнению, детей нельзя ограничивать ни в выборе материалов, ни в выборе электронных комплектующих, то есть не надо «загонять их в коробочку». На занятиях мы используем контроллеры, а материал из которого будут творить дети, подбирается в зависимости от поставленной задачи. Например, на прошлогоднем открытом первенстве Санкт-Петербурга по робототехнике мы показали модели, у которых база и колеса были сделаны из пеноплэкса, кстати, первые места они выиграли. Эти модели появились, когда мы поняли, что металлические детали слишком тяжелые для моторов из набора ТРИК. Напомню, что для ИМЛ робототехнические наборы являются инструментом для решения задач. Надоест или не надоест детям зависит только от поставленных задач, а это уже работа педагога, то же самое касается и возраста обучаемых.
Еще один провокационный вопрос. Почему ТРИК, а не любимое всеми ЛЕГО? Импортозамещение?
Вопрос действительно провокационный. Если сравнивать различные контроллеры, то у каждого найдутся свои плюсы и минусы. Мы свой выбор основывали на следующих критериях. Во-первых, очень широкий диапазон решаемых задач, во-вторых, мобильность платформы, в-третьих, конечный продукт проектной деятельности должен быть максимально приближен к реальной жизни. Из косвенных причин – отсутствие специального помещения, где бы можно было паять, а также среда программирования TRIK Studio, на мой взгляд, лучший продукт в своем сегменте, к тому же бесплатный, с хорошей техподдержкой. Огромное спасибо разработчикам.

Насколько вообще принципиален выбор той или иной платформы? Есть ли разница, на чем учить?
На чем учить — разницы действительно нет, но если брать целиком весь комплекс, то приходится подбирать наиболее универсальное решение. В этом вопросе у каждого свое видение. Мы пошли по пути ТРИК и TRIK Studio.
Интересна методическая составляющая вашего проекта. У ТРИКа разработаны и выложены на сайте некоторые методические разработки, вы исходили из них или составляли полностью уникальный продукт? Насколько вашу методику можно масштабировать для внедрения в других школах? Будут ли опубликованы ваши методические пособия?

Нехорошо считать чужие деньги, но все же 2 млн – большая для образования сумма. Приоткройте смету. Сколько конструкторов необходимо для реализации программы, подобной вашей? И сколько педагогов необходимо переобучить?
Секрета в этом тоже никакого нет. Одно из требований к участникам конкурса — составление сметы на реализацию проекта. При составлении сметы мы исходили из того, что на каждой парте в классе должен быть контроллер, а поскольку на уроках технологии класс делится пополам, получилось 8 учебных пар, то есть 16 контроллеров, которые потом задействуются во внеурочной деятельности и на кружке. Далее, оснащение стендов (10 стендов, 4 тематики). Мобильный класс и самые необходимые инструменты. На этом деньги закончились. Были заявлены еще квадрокоптеры, но прошло время, цены изменились, наверное, от них придется отказаться, не влезут в смету. Получается, что для школы деньги действительно огромные, а купить на них можно не очень много чего. Что касается преподавателей – скорее не их переучивать, а разрабатывать методические материалы для учителей. Робототехника, на самом деле, очень близка ко многим школьным предметам.
Робототехника и ИТ вообще развивается столь стремительно, что всегда есть немалый риск устареть еще до внедрения разработок. Ваш проект, насколько я понимаю, долгосрочный. Не боитесь утратить актуальность?